mirror of
https://github.com/sunnypilot/sunnypilot.git
synced 2026-06-26 05:22:07 +08:00
sunnypilot v2025.03.18-1285
version: sunnypilot v0.9.9 release date: 2025-03-18T06:26:39 master commit: 8e5b656e654a7694c22f2b0b7bee0802db02b4af
This commit is contained in:
+19
@@ -0,0 +1,19 @@
|
||||
---
|
||||
Checks: '
|
||||
bugprone-*,
|
||||
-bugprone-integer-division,
|
||||
-bugprone-narrowing-conversions,
|
||||
performance-*,
|
||||
clang-analyzer-*,
|
||||
misc-*,
|
||||
-misc-unused-parameters,
|
||||
modernize-*,
|
||||
-modernize-avoid-c-arrays,
|
||||
-modernize-deprecated-headers,
|
||||
-modernize-use-auto,
|
||||
-modernize-use-using,
|
||||
-modernize-use-nullptr,
|
||||
-modernize-use-trailing-return-type,
|
||||
'
|
||||
CheckOptions:
|
||||
...
|
||||
@@ -0,0 +1,3 @@
|
||||
Wen
|
||||
REGIST
|
||||
PullRequest
|
||||
@@ -0,0 +1,39 @@
|
||||
**/.git
|
||||
.DS_Store
|
||||
*.dylib
|
||||
*.DSYM
|
||||
*.d
|
||||
*.pyc
|
||||
*.pyo
|
||||
.*.swp
|
||||
.*.swo
|
||||
.*.un~
|
||||
*.tmp
|
||||
*.o
|
||||
*.o-*
|
||||
*.os
|
||||
*.os-*
|
||||
*.so
|
||||
*.a
|
||||
|
||||
venv/
|
||||
.venv/
|
||||
|
||||
notebooks
|
||||
phone
|
||||
massivemap
|
||||
neos
|
||||
installer
|
||||
chffr/app2
|
||||
chffr/backend/env
|
||||
selfdrive/nav
|
||||
selfdrive/baseui
|
||||
selfdrive/test/simulator2
|
||||
**/cache_data
|
||||
xx/plus
|
||||
xx/community
|
||||
xx/projects
|
||||
!xx/projects/eon_testing_master
|
||||
!xx/projects/map3d
|
||||
xx/ops
|
||||
xx/junk
|
||||
@@ -0,0 +1,11 @@
|
||||
root = true
|
||||
|
||||
[*]
|
||||
end_of_line = lf
|
||||
insert_final_newline = true
|
||||
trim_trailing_whitespace = true
|
||||
|
||||
[{*.py, *.pyx, *.pxd}]
|
||||
charset = utf-8
|
||||
indent_style = space
|
||||
indent_size = 2
|
||||
+114
@@ -0,0 +1,114 @@
|
||||
venv/
|
||||
.venv/
|
||||
.ci_cache
|
||||
.env
|
||||
.clang-format
|
||||
.DS_Store
|
||||
.tags
|
||||
.ipynb_checkpoints
|
||||
.idea
|
||||
.overlay_init
|
||||
.overlay_consistent
|
||||
.sconsign.dblite
|
||||
model2.png
|
||||
a.out
|
||||
.hypothesis
|
||||
|
||||
/docs_site/
|
||||
|
||||
*.dylib
|
||||
*.DSYM
|
||||
*.d
|
||||
*.pyc
|
||||
*.pyo
|
||||
.*.swp
|
||||
.*.swo
|
||||
.*.un~
|
||||
*.tmp
|
||||
*.o
|
||||
*.o-*
|
||||
*.os
|
||||
*.os-*
|
||||
*.so
|
||||
*.a
|
||||
*.clb
|
||||
*.class
|
||||
*.pyxbldc
|
||||
*.vcd
|
||||
*.qm
|
||||
*_pyx.cpp
|
||||
config.json
|
||||
clcache
|
||||
compile_commands.json
|
||||
compare_runtime*.html
|
||||
|
||||
persist
|
||||
selfdrive/pandad/pandad
|
||||
cereal/services.h
|
||||
cereal/gen
|
||||
cereal/messaging/bridge
|
||||
selfdrive/logcatd/logcatd
|
||||
selfdrive/mapd/default_speeds_by_region.json
|
||||
system/proclogd/proclogd
|
||||
selfdrive/ui/translations/alerts_generated.h
|
||||
selfdrive/ui/translations/tmp
|
||||
selfdrive/test/longitudinal_maneuvers/out
|
||||
selfdrive/car/tests/cars_dump
|
||||
system/camerad/camerad
|
||||
system/camerad/test/ae_gray_test
|
||||
|
||||
notebooks
|
||||
hyperthneed
|
||||
provisioning
|
||||
|
||||
.coverage*
|
||||
coverage.xml
|
||||
htmlcov
|
||||
pandaextra
|
||||
|
||||
.mypy_cache/
|
||||
flycheck_*
|
||||
|
||||
cppcheck_report.txt
|
||||
comma*.sh
|
||||
|
||||
selfdrive/modeld/thneed/compile
|
||||
selfdrive/modeld/models/*.thneed
|
||||
selfdrive/modeld/models/*.pkl
|
||||
sunnypilot/modeld*/thneed/compile
|
||||
sunnypilot/modeld*/models/*.thneed
|
||||
sunnypilot/modeld*/models/*.pkl
|
||||
|
||||
*.bz2
|
||||
*.zst
|
||||
|
||||
build/
|
||||
|
||||
!**/.gitkeep
|
||||
|
||||
poetry.toml
|
||||
Pipfile
|
||||
|
||||
### VisualStudioCode ###
|
||||
.vscode/*
|
||||
!.vscode/settings.json
|
||||
!.vscode/tasks.json
|
||||
!.vscode/launch.json
|
||||
!.vscode/extensions.json
|
||||
!.vscode/*.code-snippets
|
||||
|
||||
# Local History for Visual Studio Code
|
||||
.history/
|
||||
|
||||
# Built Visual Studio Code Extensions
|
||||
*.vsix
|
||||
|
||||
### VisualStudioCode Patch ###
|
||||
# Ignore all local history of files
|
||||
.history
|
||||
.ionide
|
||||
|
||||
### JetBrains ###
|
||||
!.idea/customTargets.xml
|
||||
!.idea/tools/*
|
||||
!.run/*
|
||||
Generated
+25
@@ -0,0 +1,25 @@
|
||||
<?xml version="1.0" encoding="UTF-8"?>
|
||||
<project version="4">
|
||||
<component name="CLionExternalBuildManager">
|
||||
<target id="a62f99e8-5ec4-434c-8122-49efed5af108" name="uv Scons Build Debug" defaultType="TOOL">
|
||||
<configuration id="b93ec964-16e5-4962-a12e-3ed360ce8f02" name="uv Scons Build Debug">
|
||||
<build type="TOOL">
|
||||
<tool actionId="Tool_External Tools_uv Scons Build Debug" />
|
||||
</build>
|
||||
<clean type="TOOL">
|
||||
<tool actionId="Tool_External Tools_uv Scons Clean" />
|
||||
</clean>
|
||||
</configuration>
|
||||
</target>
|
||||
<target id="edd8ad9d-183b-467c-a355-0d9a0ecab026" name="uv Scons Build Release" defaultType="TOOL">
|
||||
<configuration id="09523339-5ce3-4223-ab9e-904f38ad7752" name="uv Scons Build Release">
|
||||
<build type="TOOL">
|
||||
<tool actionId="Tool_External Tools_uv Scons Build Release" />
|
||||
</build>
|
||||
<clean type="TOOL">
|
||||
<tool actionId="Tool_External Tools_uv Scons Clean" />
|
||||
</clean>
|
||||
</configuration>
|
||||
</target>
|
||||
</component>
|
||||
</project>
|
||||
Generated
+23
@@ -0,0 +1,23 @@
|
||||
<toolSet name="External Tools">
|
||||
<tool name="uv Scons Build Debug" showInMainMenu="false" showInEditor="false" showInProject="false" showInSearchPopup="false" disabled="false" useConsole="true" showConsoleOnStdOut="false" showConsoleOnStdErr="false" synchronizeAfterRun="true">
|
||||
<exec>
|
||||
<option name="COMMAND" value="bash" />
|
||||
<option name="PARAMETERS" value="-c "source .venv/bin/activate && scons -u -j$(nproc) --compile_db --ccflags=\"-fno-inline\""" />
|
||||
<option name="WORKING_DIRECTORY" value="$ProjectFileDir$" />
|
||||
</exec>
|
||||
</tool>
|
||||
<tool name="uv Scons Clean" showInMainMenu="false" showInEditor="false" showInProject="false" showInSearchPopup="false" disabled="false" useConsole="true" showConsoleOnStdOut="false" showConsoleOnStdErr="false" synchronizeAfterRun="true">
|
||||
<exec>
|
||||
<option name="COMMAND" value="bash" />
|
||||
<option name="PARAMETERS" value="-c "source .venv/bin/activate && scons -c" " />
|
||||
<option name="WORKING_DIRECTORY" value="$ProjectFileDir$" />
|
||||
</exec>
|
||||
</tool>
|
||||
<tool name="uv Scons Build Release" showInMainMenu="false" showInEditor="false" showInProject="false" showInSearchPopup="false" disabled="false" useConsole="true" showConsoleOnStdOut="false" showConsoleOnStdErr="false" synchronizeAfterRun="true">
|
||||
<exec>
|
||||
<option name="COMMAND" value="bash" />
|
||||
<option name="PARAMETERS" value="-c "source .venv/bin/activate && scons -u -j$(nproc) --compile_db" " />
|
||||
<option name="WORKING_DIRECTORY" value="$ProjectFileDir$" />
|
||||
</exec>
|
||||
</tool>
|
||||
</toolSet>
|
||||
@@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="Build Debug" type="CLionExternalRunConfiguration" factoryName="Application" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" WORKING_DIR="file://$ProjectFileDir$/selfdrive/ui" PASS_PARENT_ENVS_2="true" PROJECT_NAME="sunnypilot" TARGET_NAME="uv Scons Build Debug" CONFIG_NAME="uv Scons Build Debug" RUN_PATH="ui">
|
||||
<envs>
|
||||
<env name="QT_DBL_CLICK_DIST" value="150" />
|
||||
</envs>
|
||||
<method v="2">
|
||||
<option name="CLION.EXTERNAL.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
@@ -0,0 +1,10 @@
|
||||
<component name="ProjectRunConfigurationManager">
|
||||
<configuration default="false" name="Build Release" type="CLionExternalRunConfiguration" factoryName="Application" REDIRECT_INPUT="false" ELEVATE="false" USE_EXTERNAL_CONSOLE="false" EMULATE_TERMINAL="false" WORKING_DIR="file://$ProjectFileDir$/selfdrive/ui" PASS_PARENT_ENVS_2="true" PROJECT_NAME="sunnypilot" TARGET_NAME="uv Scons Build Release" CONFIG_NAME="uv Scons Build Release" RUN_PATH="ui">
|
||||
<envs>
|
||||
<env name="QT_DBL_CLICK_DIST" value="150" />
|
||||
</envs>
|
||||
<method v="2">
|
||||
<option name="CLION.EXTERNAL.BUILD" enabled="true" />
|
||||
</method>
|
||||
</configuration>
|
||||
</component>
|
||||
Vendored
+8
@@ -0,0 +1,8 @@
|
||||
{
|
||||
"recommendations": [
|
||||
"ms-python.python",
|
||||
"ms-vscode.cpptools",
|
||||
"elagil.pre-commit-helper",
|
||||
"charliermarsh.ruff",
|
||||
]
|
||||
}
|
||||
Vendored
+46
@@ -0,0 +1,46 @@
|
||||
{
|
||||
"version": "0.2.0",
|
||||
"inputs": [
|
||||
{
|
||||
"id": "python_process",
|
||||
"type": "pickString",
|
||||
"description": "Select the process to debug",
|
||||
"options": [
|
||||
"selfdrive/controls/controlsd.py",
|
||||
"system/timed/timed.py",
|
||||
"tools/sim/run_bridge.py"
|
||||
]
|
||||
},
|
||||
{
|
||||
"id": "cpp_process",
|
||||
"type": "pickString",
|
||||
"description": "Select the process to debug",
|
||||
"options": [
|
||||
"selfdrive/ui/ui"
|
||||
]
|
||||
},
|
||||
{
|
||||
"id": "args",
|
||||
"description": "Arguments to pass to the process",
|
||||
"type": "promptString"
|
||||
}
|
||||
],
|
||||
"configurations": [
|
||||
{
|
||||
"name": "Python: openpilot Process",
|
||||
"type": "debugpy",
|
||||
"request": "launch",
|
||||
"program": "${input:python_process}",
|
||||
"console": "integratedTerminal",
|
||||
"justMyCode": true,
|
||||
"args": "${input:args}"
|
||||
},
|
||||
{
|
||||
"name": "C++: openpilot Process",
|
||||
"type": "cppdbg",
|
||||
"request": "launch",
|
||||
"program": "${workspaceFolder}/${input:cpp_process}",
|
||||
"cwd": "${workspaceFolder}",
|
||||
}
|
||||
]
|
||||
}
|
||||
Vendored
+27
@@ -0,0 +1,27 @@
|
||||
{
|
||||
"editor.tabSize": 2,
|
||||
"editor.insertSpaces": true,
|
||||
"editor.renderWhitespace": "trailing",
|
||||
"files.trimTrailingWhitespace": true,
|
||||
"search.exclude": {
|
||||
"**/.git": true,
|
||||
"**/.venv": true,
|
||||
"**/__pycache__": true
|
||||
},
|
||||
"files.exclude": {
|
||||
"**/.git": true,
|
||||
"**/.venv": true,
|
||||
"**/__pycache__": true
|
||||
},
|
||||
"python.analysis.exclude": [
|
||||
"**/.git",
|
||||
"**/.venv",
|
||||
"**/__pycache__",
|
||||
// exclude directories that should be using the symlinked version
|
||||
"common/**",
|
||||
"selfdrive/**",
|
||||
"system/**",
|
||||
"third_party/**",
|
||||
"tools/**",
|
||||
]
|
||||
}
|
||||
@@ -0,0 +1,13 @@
|
||||
FROM ghcr.io/commaai/openpilot-base:latest
|
||||
|
||||
ENV PYTHONUNBUFFERED=1
|
||||
|
||||
ENV OPENPILOT_PATH=/home/batman/openpilot
|
||||
ENV PYTHONPATH=${OPENPILOT_PATH}:${PYTHONPATH}
|
||||
|
||||
RUN mkdir -p ${OPENPILOT_PATH}
|
||||
WORKDIR ${OPENPILOT_PATH}
|
||||
|
||||
COPY . ${OPENPILOT_PATH}/
|
||||
|
||||
RUN scons --cache-readonly -j$(nproc)
|
||||
@@ -0,0 +1,81 @@
|
||||
FROM ubuntu:24.04
|
||||
|
||||
ENV PYTHONUNBUFFERED=1
|
||||
|
||||
ENV DEBIAN_FRONTEND=noninteractive
|
||||
RUN apt-get update && \
|
||||
apt-get install -y --no-install-recommends sudo tzdata locales ssh pulseaudio xvfb x11-xserver-utils gnome-screenshot python3-tk python3-dev && \
|
||||
rm -rf /var/lib/apt/lists/*
|
||||
|
||||
RUN sed -i -e 's/# en_US.UTF-8 UTF-8/en_US.UTF-8 UTF-8/' /etc/locale.gen && locale-gen
|
||||
ENV LANG=en_US.UTF-8
|
||||
ENV LANGUAGE=en_US:en
|
||||
ENV LC_ALL=en_US.UTF-8
|
||||
|
||||
COPY tools/install_ubuntu_dependencies.sh /tmp/tools/
|
||||
RUN /tmp/tools/install_ubuntu_dependencies.sh && \
|
||||
rm -rf /var/lib/apt/lists/* /tmp/* && \
|
||||
cd /usr/lib/gcc/arm-none-eabi/* && \
|
||||
rm -rf arm/ thumb/nofp thumb/v6* thumb/v8* thumb/v7+fp thumb/v7-r+fp.sp
|
||||
|
||||
# Add OpenCL
|
||||
RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
apt-utils \
|
||||
alien \
|
||||
unzip \
|
||||
tar \
|
||||
curl \
|
||||
xz-utils \
|
||||
dbus \
|
||||
gcc-arm-none-eabi \
|
||||
tmux \
|
||||
vim \
|
||||
libx11-6 \
|
||||
wget \
|
||||
&& rm -rf /var/lib/apt/lists/*
|
||||
|
||||
RUN mkdir -p /tmp/opencl-driver-intel && \
|
||||
cd /tmp/opencl-driver-intel && \
|
||||
wget https://github.com/intel/llvm/releases/download/2024-WW14/oclcpuexp-2024.17.3.0.09_rel.tar.gz && \
|
||||
wget https://github.com/oneapi-src/oneTBB/releases/download/v2021.12.0/oneapi-tbb-2021.12.0-lin.tgz && \
|
||||
mkdir -p /opt/intel/oclcpuexp_2024.17.3.0.09_rel && \
|
||||
cd /opt/intel/oclcpuexp_2024.17.3.0.09_rel && \
|
||||
tar -zxvf /tmp/opencl-driver-intel/oclcpuexp-2024.17.3.0.09_rel.tar.gz && \
|
||||
mkdir -p /etc/OpenCL/vendors && \
|
||||
echo /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64/libintelocl.so > /etc/OpenCL/vendors/intel_expcpu.icd && \
|
||||
cd /opt/intel && \
|
||||
tar -zxvf /tmp/opencl-driver-intel/oneapi-tbb-2021.12.0-lin.tgz && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbb.so /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbbmalloc.so /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbb.so.12 /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbbmalloc.so.2 /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
mkdir -p /etc/ld.so.conf.d && \
|
||||
echo /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 > /etc/ld.so.conf.d/libintelopenclexp.conf && \
|
||||
ldconfig -f /etc/ld.so.conf.d/libintelopenclexp.conf && \
|
||||
cd / && \
|
||||
rm -rf /tmp/opencl-driver-intel
|
||||
|
||||
ENV NVIDIA_VISIBLE_DEVICES=all
|
||||
ENV NVIDIA_DRIVER_CAPABILITIES=graphics,utility,compute
|
||||
ENV QTWEBENGINE_DISABLE_SANDBOX=1
|
||||
|
||||
RUN dbus-uuidgen > /etc/machine-id
|
||||
|
||||
ARG USER=batman
|
||||
ARG USER_UID=1001
|
||||
RUN useradd -m -s /bin/bash -u $USER_UID $USER
|
||||
RUN usermod -aG sudo $USER
|
||||
RUN echo '%sudo ALL=(ALL) NOPASSWD:ALL' >> /etc/sudoers
|
||||
USER $USER
|
||||
|
||||
COPY --chown=$USER pyproject.toml uv.lock /home/$USER
|
||||
COPY --chown=$USER tools/install_python_dependencies.sh /home/$USER/tools/
|
||||
|
||||
ENV VIRTUAL_ENV=/home/$USER/.venv
|
||||
ENV PATH="$VIRTUAL_ENV/bin:$PATH"
|
||||
RUN cd /home/$USER && \
|
||||
tools/install_python_dependencies.sh && \
|
||||
rm -rf tools/ pyproject.toml uv.lock .cache
|
||||
|
||||
USER root
|
||||
RUN sudo git config --global --add safe.directory /tmp/openpilot
|
||||
@@ -0,0 +1,7 @@
|
||||
Copyright (c) 2018, Comma.ai, Inc.
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||
+21
@@ -0,0 +1,21 @@
|
||||
# Custom MIT License
|
||||
|
||||
Copyright (c) 2024, Haibin Wen, SUNNYPILOT LLC
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to view and modify the Software, subject to the following conditions:
|
||||
|
||||
1. **Permission Required**: Permission Required for Commercial, For-Profit, or Closed Source Use: Use of the Software, in whole or in part, for any commercial purposes, for-profit projects, or in closed source projects requires explicit written permission from the original author(s).
|
||||
|
||||
2. **Redistribution**: Any redistribution of the Software, modified or unmodified, must retain this license notice and the following acknowledgment:
|
||||
"This software is licensed under a custom license requiring permission for use."
|
||||
|
||||
3. **Visibility**: Any project that uses the Software must visibly mention the following acknowledgment:
|
||||
"This project uses software from Haibin Wen and SUNNYPILOT LLC and is licensed under a custom license requiring permission for use."
|
||||
|
||||
4. **No Warranty**: THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||
|
||||
Contact sunnypilot Support <support@sunnypilot.ai> for permission requests.
|
||||
|
||||
---
|
||||
|
||||
Haibin Wen, SUNNYPILOT LLC
|
||||
@@ -0,0 +1,107 @@
|
||||
<div align="center" style="text-align: center;">
|
||||
|
||||
<h1>openpilot</h1>
|
||||
|
||||
<p>
|
||||
<b>openpilot is an operating system for robotics.</b>
|
||||
<br>
|
||||
Currently, it upgrades the driver assistance system in 275+ supported cars.
|
||||
</p>
|
||||
|
||||
<h3>
|
||||
<a href="https://docs.comma.ai">Docs</a>
|
||||
<span> · </span>
|
||||
<a href="https://docs.comma.ai/contributing/roadmap/">Roadmap</a>
|
||||
<span> · </span>
|
||||
<a href="https://github.com/commaai/openpilot/blob/master/docs/CONTRIBUTING.md">Contribute</a>
|
||||
<span> · </span>
|
||||
<a href="https://discord.comma.ai">Community</a>
|
||||
<span> · </span>
|
||||
<a href="https://comma.ai/shop">Try it on a comma 3X</a>
|
||||
</h3>
|
||||
|
||||
Quick start: `bash <(curl -fsSL openpilot.comma.ai)`
|
||||
|
||||

|
||||
[](https://codecov.io/gh/commaai/openpilot)
|
||||
[](LICENSE)
|
||||
[](https://x.com/comma_ai)
|
||||
[](https://discord.comma.ai)
|
||||
|
||||
</div>
|
||||
|
||||
<table>
|
||||
<tr>
|
||||
<td><a href="https://youtu.be/NmBfgOanCyk" title="Video By Greer Viau"><img src="https://github.com/commaai/openpilot/assets/8762862/2f7112ae-f748-4f39-b617-fabd689c3772"></a></td>
|
||||
<td><a href="https://youtu.be/VHKyqZ7t8Gw" title="Video By Logan LeGrand"><img src="https://github.com/commaai/openpilot/assets/8762862/92351544-2833-40d7-9e0b-7ef7ae37ec4c"></a></td>
|
||||
<td><a href="https://youtu.be/SUIZYzxtMQs" title="A drive to Taco Bell"><img src="https://github.com/commaai/openpilot/assets/8762862/05ceefc5-2628-439c-a9b2-89ce77dc6f63"></a></td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
|
||||
Using openpilot in a car
|
||||
------
|
||||
|
||||
To use openpilot in a car, you need four things:
|
||||
1. **Supported Device:** a comma 3/3X, available at [comma.ai/shop](https://comma.ai/shop/comma-3x).
|
||||
2. **Software:** The setup procedure for the comma 3/3X allows users to enter a URL for custom software. Use the URL `openpilot.comma.ai` to install the release version.
|
||||
3. **Supported Car:** Ensure that you have one of [the 275+ supported cars](docs/CARS.md).
|
||||
4. **Car Harness:** You will also need a [car harness](https://comma.ai/shop/car-harness) to connect your comma 3/3X to your car.
|
||||
|
||||
We have detailed instructions for [how to install the harness and device in a car](https://comma.ai/setup). Note that it's possible to run openpilot on [other hardware](https://blog.comma.ai/self-driving-car-for-free/), although it's not plug-and-play.
|
||||
|
||||
### Branches
|
||||
| branch | URL | description |
|
||||
|------------------|----------------------------------------|-------------------------------------------------------------------------------------|
|
||||
| `release3` | openpilot.comma.ai | This is openpilot's release branch. |
|
||||
| `release3-staging` | openpilot-test.comma.ai | This is the staging branch for releases. Use it to get new releases slightly early. |
|
||||
| `nightly` | openpilot-nightly.comma.ai | This is the bleeding edge development branch. Do not expect this to be stable. |
|
||||
| `nightly-dev` | installer.comma.ai/commaai/nightly-dev | Same as nightly, but includes experimental development features for some cars. |
|
||||
|
||||
To start developing openpilot
|
||||
------
|
||||
|
||||
openpilot is developed by [comma](https://comma.ai/) and by users like you. We welcome both pull requests and issues on [GitHub](http://github.com/commaai/openpilot).
|
||||
|
||||
* Join the [community Discord](https://discord.comma.ai)
|
||||
* Check out [the contributing docs](docs/CONTRIBUTING.md)
|
||||
* Check out the [openpilot tools](tools/)
|
||||
* Read about the [development workflow](docs/WORKFLOW.md)
|
||||
* Code documentation lives at https://docs.comma.ai
|
||||
* Information about running openpilot lives on the [community wiki](https://github.com/commaai/openpilot/wiki)
|
||||
|
||||
Want to get paid to work on openpilot? [comma is hiring](https://comma.ai/jobs#open-positions) and offers lots of [bounties](https://comma.ai/bounties) for external contributors.
|
||||
|
||||
Safety and Testing
|
||||
----
|
||||
|
||||
* openpilot observes [ISO26262](https://en.wikipedia.org/wiki/ISO_26262) guidelines, see [SAFETY.md](docs/SAFETY.md) for more details.
|
||||
* openpilot has software-in-the-loop [tests](.github/workflows/selfdrive_tests.yaml) that run on every commit.
|
||||
* The code enforcing the safety model lives in panda and is written in C, see [code rigor](https://github.com/commaai/panda#code-rigor) for more details.
|
||||
* panda has software-in-the-loop [safety tests](https://github.com/commaai/panda/tree/master/tests/safety).
|
||||
* Internally, we have a hardware-in-the-loop Jenkins test suite that builds and unit tests the various processes.
|
||||
* panda has additional hardware-in-the-loop [tests](https://github.com/commaai/panda/blob/master/Jenkinsfile).
|
||||
* We run the latest openpilot in a testing closet containing 10 comma devices continuously replaying routes.
|
||||
|
||||
Licensing
|
||||
------
|
||||
|
||||
openpilot is released under the MIT license. Some parts of the software are released under other licenses as specified.
|
||||
|
||||
Any user of this software shall indemnify and hold harmless Comma.ai, Inc. and its directors, officers, employees, agents, stockholders, affiliates, subcontractors and customers from and against all allegations, claims, actions, suits, demands, damages, liabilities, obligations, losses, settlements, judgments, costs and expenses (including without limitation attorneys’ fees and costs) which arise out of, relate to or result from any use of this software by user.
|
||||
|
||||
**THIS IS ALPHA QUALITY SOFTWARE FOR RESEARCH PURPOSES ONLY. THIS IS NOT A PRODUCT.
|
||||
YOU ARE RESPONSIBLE FOR COMPLYING WITH LOCAL LAWS AND REGULATIONS.
|
||||
NO WARRANTY EXPRESSED OR IMPLIED.**
|
||||
|
||||
User Data and comma Account
|
||||
------
|
||||
|
||||
By default, openpilot uploads the driving data to our servers. You can also access your data through [comma connect](https://connect.comma.ai/). We use your data to train better models and improve openpilot for everyone.
|
||||
|
||||
openpilot is open source software: the user is free to disable data collection if they wish to do so.
|
||||
|
||||
openpilot logs the road-facing cameras, CAN, GPS, IMU, magnetometer, thermal sensors, crashes, and operating system logs.
|
||||
The driver-facing camera is only logged if you explicitly opt-in in settings. The microphone is not recorded.
|
||||
|
||||
By using openpilot, you agree to [our Privacy Policy](https://comma.ai/privacy). You understand that use of this software or its related services will generate certain types of user data, which may be logged and stored at the sole discretion of comma. By accepting this agreement, you grant an irrevocable, perpetual, worldwide right to comma for the use of this data.
|
||||
+1051
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,5 @@
|
||||
# Security Policy
|
||||
|
||||
## Reporting a Vulnerability
|
||||
|
||||
Suspected vulnerabilities can be reported to both `adeeb@comma.ai` and `security@comma.ai`.
|
||||
@@ -0,0 +1,95 @@
|
||||
# What is cereal?
|
||||
|
||||
cereal is the messaging system for openpilot. It uses [msgq](https://github.com/commaai/msgq) as a pub/sub backend, and [Cap'n proto](https://capnproto.org/capnp-tool.html) for serialization of the structs.
|
||||
|
||||
|
||||
## Messaging Spec
|
||||
|
||||
You'll find the message types in [log.capnp](log.capnp). It uses [Cap'n proto](https://capnproto.org/capnp-tool.html) and defines one struct called `Event`.
|
||||
|
||||
All `Events` have a `logMonoTime` and a `valid`. Then a big union defines the packet type.
|
||||
|
||||
### Best Practices
|
||||
|
||||
- **All fields must describe quantities in SI units**, unless otherwise specified in the field name.
|
||||
- In the context of the message they are in, field names should be completely unambiguous.
|
||||
- All values should be easy to plot and be human-readable with minimal parsing.
|
||||
|
||||
### Maintaining backwards-compatibility
|
||||
|
||||
When making changes to the messaging spec you want to maintain backwards-compatibility, such that old logs can
|
||||
be parsed with a new version of cereal. Adding structs and adding members to structs is generally safe, most other
|
||||
things are not. Read more details [here](https://capnproto.org/language.html).
|
||||
|
||||
### Custom forks
|
||||
|
||||
Forks of [openpilot](https://github.com/commaai/openpilot) might want to add things to the messaging
|
||||
spec, however this could conflict with future changes made in mainline cereal/openpilot. Rebasing against mainline openpilot
|
||||
then means breaking backwards-compatibility with all old logs of your fork. So we added reserved events in
|
||||
[custom.capnp](custom.capnp) that we will leave empty in mainline cereal/openpilot. **If you only modify those, you can ensure your
|
||||
fork will remain backwards-compatible with all versions of mainline openpilot and your fork.**
|
||||
|
||||
An example of compatible changes:
|
||||
```diff
|
||||
diff --git a/cereal/custom.capnp b/cereal/custom.capnp
|
||||
index 3348e859e..3365c7b98 100644
|
||||
--- a/cereal/custom.capnp
|
||||
+++ b/cereal/custom.capnp
|
||||
@@ -10,7 +10,11 @@ $Cxx.namespace("cereal");
|
||||
# DO rename the structs
|
||||
# DON'T change the identifier (e.g. @0x81c2f05a394cf4af)
|
||||
|
||||
-struct CustomReserved0 @0x81c2f05a394cf4af {
|
||||
+struct SteeringInfo @0x81c2f05a394cf4af {
|
||||
+ active @0 :Bool;
|
||||
+ steeringAngleDeg @1 :Float32;
|
||||
+ steeringRateDeg @2 :Float32;
|
||||
+ steeringAccelDeg @3 :Float32;
|
||||
}
|
||||
|
||||
struct CustomReserved1 @0xaedffd8f31e7b55d {
|
||||
diff --git a/cereal/log.capnp b/cereal/log.capnp
|
||||
index 1209f3fd9..b189f58b6 100644
|
||||
--- a/cereal/log.capnp
|
||||
+++ b/cereal/log.capnp
|
||||
@@ -2558,14 +2558,14 @@ struct Event {
|
||||
|
||||
# DO change the name of the field
|
||||
# DON'T change anything after the "@"
|
||||
- customReservedRawData0 @124 :Data;
|
||||
+ rawCanData @124 :Data;
|
||||
customReservedRawData1 @125 :Data;
|
||||
customReservedRawData2 @126 :Data;
|
||||
|
||||
# DO change the name of the field and struct
|
||||
# DON'T change the ID (e.g. @107)
|
||||
# DON'T change which struct it points to
|
||||
- customReserved0 @107 :Custom.CustomReserved0;
|
||||
+ steeringInfo @107 :Custom.SteeringInfo;
|
||||
customReserved1 @108 :Custom.CustomReserved1;
|
||||
customReserved2 @109 :Custom.CustomReserved2;
|
||||
customReserved3 @110 :Custom.CustomReserved3;
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
Example
|
||||
---
|
||||
```python
|
||||
import cereal.messaging as messaging
|
||||
|
||||
# in subscriber
|
||||
sm = messaging.SubMaster(['sensorEvents'])
|
||||
while 1:
|
||||
sm.update()
|
||||
print(sm['sensorEvents'])
|
||||
|
||||
```
|
||||
|
||||
```python
|
||||
# in publisher
|
||||
pm = messaging.PubMaster(['sensorEvents'])
|
||||
dat = messaging.new_message('sensorEvents', size=1)
|
||||
dat.sensorEvents[0] = {"gyro": {"v": [0.1, -0.1, 0.1]}}
|
||||
pm.send('sensorEvents', dat)
|
||||
```
|
||||
@@ -0,0 +1,9 @@
|
||||
import os
|
||||
import capnp
|
||||
|
||||
CEREAL_PATH = os.path.dirname(os.path.abspath(__file__))
|
||||
capnp.remove_import_hook()
|
||||
|
||||
log = capnp.load(os.path.join(CEREAL_PATH, "log.capnp"))
|
||||
car = capnp.load(os.path.join(CEREAL_PATH, "car.capnp"))
|
||||
custom = capnp.load(os.path.join(CEREAL_PATH, "custom.capnp"))
|
||||
Symlink
+1
@@ -0,0 +1 @@
|
||||
../opendbc_repo/opendbc/car/car.capnp
|
||||
@@ -0,0 +1,196 @@
|
||||
using Cxx = import "./include/c++.capnp";
|
||||
$Cxx.namespace("cereal");
|
||||
|
||||
@0xb526ba661d550a59;
|
||||
|
||||
# custom.capnp: a home for empty structs reserved for custom forks
|
||||
# These structs are guaranteed to remain reserved and empty in mainline
|
||||
# cereal, so use these if you want custom events in your fork.
|
||||
|
||||
# DO rename the structs
|
||||
# DON'T change the identifier (e.g. @0x81c2f05a394cf4af)
|
||||
|
||||
struct ModularAssistiveDrivingSystem {
|
||||
state @0 :ModularAssistiveDrivingSystemState;
|
||||
enabled @1 :Bool;
|
||||
active @2 :Bool;
|
||||
available @3 :Bool;
|
||||
|
||||
enum ModularAssistiveDrivingSystemState {
|
||||
disabled @0;
|
||||
paused @1;
|
||||
enabled @2;
|
||||
softDisabling @3;
|
||||
overriding @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct SelfdriveStateSP @0x81c2f05a394cf4af {
|
||||
mads @0 :ModularAssistiveDrivingSystem;
|
||||
}
|
||||
|
||||
struct ModelManagerSP @0xaedffd8f31e7b55d {
|
||||
activeBundle @0 :ModelBundle;
|
||||
selectedBundle @1 :ModelBundle;
|
||||
availableBundles @2 :List(ModelBundle);
|
||||
|
||||
struct DownloadUri {
|
||||
uri @0 :Text;
|
||||
sha256 @1 :Text;
|
||||
}
|
||||
|
||||
enum Type {
|
||||
drive @0;
|
||||
navigation @1;
|
||||
metadata @2;
|
||||
}
|
||||
|
||||
struct Model {
|
||||
fullName @0 :Text;
|
||||
fileName @1 :Text;
|
||||
downloadUri @2 :DownloadUri;
|
||||
downloadProgress @3 :DownloadProgress;
|
||||
type @4 :Type;
|
||||
}
|
||||
|
||||
enum DownloadStatus {
|
||||
notDownloading @0;
|
||||
downloading @1;
|
||||
downloaded @2;
|
||||
cached @3;
|
||||
failed @4;
|
||||
}
|
||||
|
||||
struct DownloadProgress {
|
||||
status @0 :DownloadStatus;
|
||||
progress @1 :Float32;
|
||||
eta @2 :UInt32;
|
||||
}
|
||||
|
||||
enum Runner {
|
||||
snpe @0;
|
||||
tinygrad @1;
|
||||
stock @2;
|
||||
}
|
||||
|
||||
struct ModelBundle {
|
||||
index @0 :UInt32;
|
||||
internalName @1 :Text;
|
||||
displayName @2 :Text;
|
||||
models @3 :List(Model);
|
||||
status @4 :DownloadStatus;
|
||||
generation @5 :UInt32;
|
||||
environment @6 :Text;
|
||||
runner @7 :Runner;
|
||||
is20hz @8 :Bool;
|
||||
}
|
||||
}
|
||||
|
||||
struct LongitudinalPlanSP @0xf35cc4560bbf6ec2 {
|
||||
dec @0 :DynamicExperimentalControl;
|
||||
|
||||
struct DynamicExperimentalControl {
|
||||
state @0 :DynamicExperimentalControlState;
|
||||
enabled @1 :Bool;
|
||||
active @2 :Bool;
|
||||
|
||||
enum DynamicExperimentalControlState {
|
||||
acc @0;
|
||||
blended @1;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct OnroadEventSP @0xda96579883444c35 {
|
||||
name @0 :EventName;
|
||||
|
||||
# event types
|
||||
enable @1 :Bool;
|
||||
noEntry @2 :Bool;
|
||||
warning @3 :Bool; # alerts presented only when enabled or soft disabling
|
||||
userDisable @4 :Bool;
|
||||
softDisable @5 :Bool;
|
||||
immediateDisable @6 :Bool;
|
||||
preEnable @7 :Bool;
|
||||
permanent @8 :Bool; # alerts presented regardless of openpilot state
|
||||
overrideLateral @10 :Bool;
|
||||
overrideLongitudinal @9 :Bool;
|
||||
|
||||
enum EventName {
|
||||
lkasEnable @0;
|
||||
lkasDisable @1;
|
||||
manualSteeringRequired @2;
|
||||
manualLongitudinalRequired @3;
|
||||
silentLkasEnable @4;
|
||||
silentLkasDisable @5;
|
||||
silentBrakeHold @6;
|
||||
silentWrongGear @7;
|
||||
silentReverseGear @8;
|
||||
silentDoorOpen @9;
|
||||
silentSeatbeltNotLatched @10;
|
||||
silentParkBrake @11;
|
||||
controlsMismatchLateral @12;
|
||||
hyundaiRadarTracksConfirmed @13;
|
||||
experimentalModeSwitched @14;
|
||||
}
|
||||
}
|
||||
|
||||
struct CarParamsSP @0x80ae746ee2596b11 {
|
||||
flags @0 :UInt32; # flags for car specific quirks in sunnypilot
|
||||
safetyParam @1 : Int16; # flags for sunnypilot's custom safety flags
|
||||
|
||||
neuralNetworkLateralControl @2 :NeuralNetworkLateralControl;
|
||||
|
||||
struct NeuralNetworkLateralControl {
|
||||
enabled @0 :Bool;
|
||||
modelPath @1 :Text;
|
||||
modelName @2 :Text;
|
||||
fuzzyFingerprint @3 :Bool;
|
||||
}
|
||||
}
|
||||
|
||||
struct CarControlSP @0xa5cd762cd951a455 {
|
||||
mads @0 :ModularAssistiveDrivingSystem;
|
||||
}
|
||||
|
||||
struct CustomReserved6 @0xf98d843bfd7004a3 {
|
||||
}
|
||||
|
||||
struct CustomReserved7 @0xb86e6369214c01c8 {
|
||||
}
|
||||
|
||||
struct CustomReserved8 @0xf416ec09499d9d19 {
|
||||
}
|
||||
|
||||
struct CustomReserved9 @0xa1680744031fdb2d {
|
||||
}
|
||||
|
||||
struct CustomReserved10 @0xcb9fd56c7057593a {
|
||||
}
|
||||
|
||||
struct CustomReserved11 @0xc2243c65e0340384 {
|
||||
}
|
||||
|
||||
struct CustomReserved12 @0x9ccdc8676701b412 {
|
||||
}
|
||||
|
||||
struct CustomReserved13 @0xcd96dafb67a082d0 {
|
||||
}
|
||||
|
||||
struct CustomReserved14 @0xb057204d7deadf3f {
|
||||
}
|
||||
|
||||
struct CustomReserved15 @0xbd443b539493bc68 {
|
||||
}
|
||||
|
||||
struct CustomReserved16 @0xfc6241ed8877b611 {
|
||||
}
|
||||
|
||||
struct CustomReserved17 @0xa30662f84033036c {
|
||||
}
|
||||
|
||||
struct CustomReserved18 @0xc86a3d38d13eb3ef {
|
||||
}
|
||||
|
||||
struct CustomReserved19 @0xa4f1eb3323f5f582 {
|
||||
}
|
||||
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,26 @@
|
||||
# Copyright (c) 2013-2014 Sandstorm Development Group, Inc. and contributors
|
||||
# Licensed under the MIT License:
|
||||
#
|
||||
# Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
# of this software and associated documentation files (the "Software"), to deal
|
||||
# in the Software without restriction, including without limitation the rights
|
||||
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
# copies of the Software, and to permit persons to whom the Software is
|
||||
# furnished to do so, subject to the following conditions:
|
||||
#
|
||||
# The above copyright notice and this permission notice shall be included in
|
||||
# all copies or substantial portions of the Software.
|
||||
#
|
||||
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
|
||||
# THE SOFTWARE.
|
||||
|
||||
@0xbdf87d7bb8304e81;
|
||||
$namespace("capnp::annotations");
|
||||
|
||||
annotation namespace(file): Text;
|
||||
annotation name(field, enumerant, struct, enum, interface, method, param, group, union): Text;
|
||||
@@ -0,0 +1,574 @@
|
||||
using Cxx = import "./include/c++.capnp";
|
||||
$Cxx.namespace("cereal");
|
||||
|
||||
@0x80ef1ec4889c2a63;
|
||||
|
||||
# legacy.capnp: a home for deprecated structs
|
||||
|
||||
struct LogRotate @0x9811e1f38f62f2d1 {
|
||||
segmentNum @0 :Int32;
|
||||
path @1 :Text;
|
||||
}
|
||||
|
||||
struct LiveUI @0xc08240f996aefced {
|
||||
rearViewCam @0 :Bool;
|
||||
alertText1 @1 :Text;
|
||||
alertText2 @2 :Text;
|
||||
awarenessStatus @3 :Float32;
|
||||
}
|
||||
|
||||
struct UiLayoutState @0x88dcce08ad29dda0 {
|
||||
activeApp @0 :App;
|
||||
sidebarCollapsed @1 :Bool;
|
||||
mapEnabled @2 :Bool;
|
||||
mockEngaged @3 :Bool;
|
||||
|
||||
enum App @0x9917470acf94d285 {
|
||||
home @0;
|
||||
music @1;
|
||||
nav @2;
|
||||
settings @3;
|
||||
none @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct OrbslamCorrection @0x8afd33dc9b35e1aa {
|
||||
correctionMonoTime @0 :UInt64;
|
||||
prePositionECEF @1 :List(Float64);
|
||||
postPositionECEF @2 :List(Float64);
|
||||
prePoseQuatECEF @3 :List(Float32);
|
||||
postPoseQuatECEF @4 :List(Float32);
|
||||
numInliers @5 :UInt32;
|
||||
}
|
||||
|
||||
struct EthernetPacket @0xa99a9d5b33cf5859 {
|
||||
pkt @0 :Data;
|
||||
ts @1 :Float32;
|
||||
}
|
||||
|
||||
struct CellInfo @0xcff7566681c277ce {
|
||||
timestamp @0 :UInt64;
|
||||
repr @1 :Text; # android toString() for now
|
||||
}
|
||||
|
||||
struct WifiScan @0xd4df5a192382ba0b {
|
||||
bssid @0 :Text;
|
||||
ssid @1 :Text;
|
||||
capabilities @2 :Text;
|
||||
frequency @3 :Int32;
|
||||
level @4 :Int32;
|
||||
timestamp @5 :Int64;
|
||||
|
||||
centerFreq0 @6 :Int32;
|
||||
centerFreq1 @7 :Int32;
|
||||
channelWidth @8 :ChannelWidth;
|
||||
operatorFriendlyName @9 :Text;
|
||||
venueName @10 :Text;
|
||||
is80211mcResponder @11 :Bool;
|
||||
passpoint @12 :Bool;
|
||||
|
||||
distanceCm @13 :Int32;
|
||||
distanceSdCm @14 :Int32;
|
||||
|
||||
enum ChannelWidth @0xcb6a279f015f6b51 {
|
||||
w20Mhz @0;
|
||||
w40Mhz @1;
|
||||
w80Mhz @2;
|
||||
w160Mhz @3;
|
||||
w80Plus80Mhz @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct LiveEventData @0x94b7baa90c5c321e {
|
||||
name @0 :Text;
|
||||
value @1 :Int32;
|
||||
}
|
||||
|
||||
struct ModelData @0xb8aad62cffef28a9 {
|
||||
frameId @0 :UInt32;
|
||||
frameAge @12 :UInt32;
|
||||
frameDropPerc @13 :Float32;
|
||||
timestampEof @9 :UInt64;
|
||||
modelExecutionTime @14 :Float32;
|
||||
gpuExecutionTime @16 :Float32;
|
||||
rawPred @15 :Data;
|
||||
|
||||
path @1 :PathData;
|
||||
leftLane @2 :PathData;
|
||||
rightLane @3 :PathData;
|
||||
lead @4 :LeadData;
|
||||
freePath @6 :List(Float32);
|
||||
|
||||
settings @5 :ModelSettings;
|
||||
leadFuture @7 :LeadData;
|
||||
speed @8 :List(Float32);
|
||||
meta @10 :MetaData;
|
||||
longitudinal @11 :LongitudinalData;
|
||||
|
||||
struct PathData @0x8817eeea389e9f08 {
|
||||
points @0 :List(Float32);
|
||||
prob @1 :Float32;
|
||||
std @2 :Float32;
|
||||
stds @3 :List(Float32);
|
||||
poly @4 :List(Float32);
|
||||
validLen @5 :Float32;
|
||||
}
|
||||
|
||||
struct LeadData @0xd1c9bef96d26fa91 {
|
||||
dist @0 :Float32;
|
||||
prob @1 :Float32;
|
||||
std @2 :Float32;
|
||||
relVel @3 :Float32;
|
||||
relVelStd @4 :Float32;
|
||||
relY @5 :Float32;
|
||||
relYStd @6 :Float32;
|
||||
relA @7 :Float32;
|
||||
relAStd @8 :Float32;
|
||||
}
|
||||
|
||||
struct ModelSettings @0xa26e3710efd3e914 {
|
||||
bigBoxX @0 :UInt16;
|
||||
bigBoxY @1 :UInt16;
|
||||
bigBoxWidth @2 :UInt16;
|
||||
bigBoxHeight @3 :UInt16;
|
||||
boxProjection @4 :List(Float32);
|
||||
yuvCorrection @5 :List(Float32);
|
||||
inputTransform @6 :List(Float32);
|
||||
}
|
||||
|
||||
struct MetaData @0x9744f25fb60f2bf8 {
|
||||
engagedProb @0 :Float32;
|
||||
desirePrediction @1 :List(Float32);
|
||||
brakeDisengageProb @2 :Float32;
|
||||
gasDisengageProb @3 :Float32;
|
||||
steerOverrideProb @4 :Float32;
|
||||
desireState @5 :List(Float32);
|
||||
}
|
||||
|
||||
struct LongitudinalData @0xf98f999c6a071122 {
|
||||
distances @2 :List(Float32);
|
||||
speeds @0 :List(Float32);
|
||||
accelerations @1 :List(Float32);
|
||||
}
|
||||
}
|
||||
|
||||
struct ECEFPoint @0xc25bbbd524983447 {
|
||||
x @0 :Float64;
|
||||
y @1 :Float64;
|
||||
z @2 :Float64;
|
||||
}
|
||||
|
||||
struct ECEFPointDEPRECATED @0xe10e21168db0c7f7 {
|
||||
x @0 :Float32;
|
||||
y @1 :Float32;
|
||||
z @2 :Float32;
|
||||
}
|
||||
|
||||
struct GPSPlannerPoints @0xab54c59699f8f9f3 {
|
||||
curPosDEPRECATED @0 :ECEFPointDEPRECATED;
|
||||
pointsDEPRECATED @1 :List(ECEFPointDEPRECATED);
|
||||
curPos @6 :ECEFPoint;
|
||||
points @7 :List(ECEFPoint);
|
||||
valid @2 :Bool;
|
||||
trackName @3 :Text;
|
||||
speedLimit @4 :Float32;
|
||||
accelTarget @5 :Float32;
|
||||
}
|
||||
|
||||
struct GPSPlannerPlan @0xf5ad1d90cdc1dd6b {
|
||||
valid @0 :Bool;
|
||||
poly @1 :List(Float32);
|
||||
trackName @2 :Text;
|
||||
speed @3 :Float32;
|
||||
acceleration @4 :Float32;
|
||||
pointsDEPRECATED @5 :List(ECEFPointDEPRECATED);
|
||||
points @6 :List(ECEFPoint);
|
||||
xLookahead @7 :Float32;
|
||||
}
|
||||
|
||||
struct UiNavigationEvent @0x90c8426c3eaddd3b {
|
||||
type @0: Type;
|
||||
status @1: Status;
|
||||
distanceTo @2: Float32;
|
||||
endRoadPointDEPRECATED @3: ECEFPointDEPRECATED;
|
||||
endRoadPoint @4: ECEFPoint;
|
||||
|
||||
enum Type @0xe8db07dcf8fcea05 {
|
||||
none @0;
|
||||
laneChangeLeft @1;
|
||||
laneChangeRight @2;
|
||||
mergeLeft @3;
|
||||
mergeRight @4;
|
||||
turnLeft @5;
|
||||
turnRight @6;
|
||||
}
|
||||
|
||||
enum Status @0xb9aa88c75ef99a1f {
|
||||
none @0;
|
||||
passive @1;
|
||||
approaching @2;
|
||||
active @3;
|
||||
}
|
||||
}
|
||||
|
||||
struct LiveLocationData @0xb99b2bc7a57e8128 {
|
||||
status @0 :UInt8;
|
||||
|
||||
# 3D fix
|
||||
lat @1 :Float64;
|
||||
lon @2 :Float64;
|
||||
alt @3 :Float32; # m
|
||||
|
||||
# speed
|
||||
speed @4 :Float32; # m/s
|
||||
|
||||
# NED velocity components
|
||||
vNED @5 :List(Float32);
|
||||
|
||||
# roll, pitch, heading (x,y,z)
|
||||
roll @6 :Float32; # WRT to center of earth?
|
||||
pitch @7 :Float32; # WRT to center of earth?
|
||||
heading @8 :Float32; # WRT to north?
|
||||
|
||||
# what are these?
|
||||
wanderAngle @9 :Float32;
|
||||
trackAngle @10 :Float32;
|
||||
|
||||
# car frame -- https://upload.wikimedia.org/wikipedia/commons/f/f5/RPY_angles_of_cars.png
|
||||
|
||||
# gyro, in car frame, deg/s
|
||||
gyro @11 :List(Float32);
|
||||
|
||||
# accel, in car frame, m/s^2
|
||||
accel @12 :List(Float32);
|
||||
|
||||
accuracy @13 :Accuracy;
|
||||
|
||||
source @14 :SensorSource;
|
||||
# if we are fixing a location in the past
|
||||
fixMonoTime @15 :UInt64;
|
||||
|
||||
gpsWeek @16 :Int32;
|
||||
timeOfWeek @17 :Float64;
|
||||
|
||||
positionECEF @18 :List(Float64);
|
||||
poseQuatECEF @19 :List(Float32);
|
||||
pitchCalibration @20 :Float32;
|
||||
yawCalibration @21 :Float32;
|
||||
imuFrame @22 :List(Float32);
|
||||
|
||||
struct Accuracy @0x943dc4625473b03f {
|
||||
pNEDError @0 :List(Float32);
|
||||
vNEDError @1 :List(Float32);
|
||||
rollError @2 :Float32;
|
||||
pitchError @3 :Float32;
|
||||
headingError @4 :Float32;
|
||||
ellipsoidSemiMajorError @5 :Float32;
|
||||
ellipsoidSemiMinorError @6 :Float32;
|
||||
ellipsoidOrientationError @7 :Float32;
|
||||
}
|
||||
|
||||
enum SensorSource @0xc871d3cc252af657 {
|
||||
applanix @0;
|
||||
kalman @1;
|
||||
orbslam @2;
|
||||
timing @3;
|
||||
dummy @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct OrbOdometry @0xd7700859ed1f5b76 {
|
||||
# timing first
|
||||
startMonoTime @0 :UInt64;
|
||||
endMonoTime @1 :UInt64;
|
||||
|
||||
# fundamental matrix and error
|
||||
f @2: List(Float64);
|
||||
err @3: Float64;
|
||||
|
||||
# number of inlier points
|
||||
inliers @4: Int32;
|
||||
|
||||
# for debug only
|
||||
# indexed by endMonoTime features
|
||||
# value is startMonoTime feature match
|
||||
# -1 if no match
|
||||
matches @5: List(Int16);
|
||||
}
|
||||
|
||||
struct OrbFeatures @0xcd60164a8a0159ef {
|
||||
timestampEof @0 :UInt64;
|
||||
# transposed arrays of normalized image coordinates
|
||||
# len(xs) == len(ys) == len(descriptors) * 32
|
||||
xs @1 :List(Float32);
|
||||
ys @2 :List(Float32);
|
||||
descriptors @3 :Data;
|
||||
octaves @4 :List(Int8);
|
||||
|
||||
# match index to last OrbFeatures
|
||||
# -1 if no match
|
||||
timestampLastEof @5 :UInt64;
|
||||
matches @6: List(Int16);
|
||||
}
|
||||
|
||||
struct OrbFeaturesSummary @0xd500d30c5803fa4f {
|
||||
timestampEof @0 :UInt64;
|
||||
timestampLastEof @1 :UInt64;
|
||||
|
||||
featureCount @2 :UInt16;
|
||||
matchCount @3 :UInt16;
|
||||
computeNs @4 :UInt64;
|
||||
}
|
||||
|
||||
struct OrbKeyFrame @0xc8233c0345e27e24 {
|
||||
# this is a globally unique id for the KeyFrame
|
||||
id @0: UInt64;
|
||||
|
||||
# this is the location of the KeyFrame
|
||||
pos @1: ECEFPoint;
|
||||
|
||||
# these are the features in the world
|
||||
# len(dpos) == len(descriptors) * 32
|
||||
dpos @2 :List(ECEFPoint);
|
||||
descriptors @3 :Data;
|
||||
}
|
||||
|
||||
struct KalmanOdometry @0x92e21bb7ea38793a {
|
||||
trans @0 :List(Float32); # m/s in device frame
|
||||
rot @1 :List(Float32); # rad/s in device frame
|
||||
transStd @2 :List(Float32); # std m/s in device frame
|
||||
rotStd @3 :List(Float32); # std rad/s in device frame
|
||||
}
|
||||
|
||||
struct OrbObservation @0x9b326d4e436afec7 {
|
||||
observationMonoTime @0 :UInt64;
|
||||
normalizedCoordinates @1 :List(Float32);
|
||||
locationECEF @2 :List(Float64);
|
||||
matchDistance @3: UInt32;
|
||||
}
|
||||
|
||||
struct CalibrationFeatures @0x8fdfadb254ea867a {
|
||||
frameId @0 :UInt32;
|
||||
|
||||
p0 @1 :List(Float32);
|
||||
p1 @2 :List(Float32);
|
||||
status @3 :List(Int8);
|
||||
}
|
||||
|
||||
struct NavStatus @0xbd8822120928120c {
|
||||
isNavigating @0 :Bool;
|
||||
currentAddress @1 :Address;
|
||||
|
||||
struct Address @0xce7cd672cacc7814 {
|
||||
title @0 :Text;
|
||||
lat @1 :Float64;
|
||||
lng @2 :Float64;
|
||||
house @3 :Text;
|
||||
address @4 :Text;
|
||||
street @5 :Text;
|
||||
city @6 :Text;
|
||||
state @7 :Text;
|
||||
country @8 :Text;
|
||||
}
|
||||
}
|
||||
|
||||
struct NavUpdate @0xdb98be6565516acb {
|
||||
isNavigating @0 :Bool;
|
||||
curSegment @1 :Int32;
|
||||
segments @2 :List(Segment);
|
||||
|
||||
struct LatLng @0x9eaef9187cadbb9b {
|
||||
lat @0 :Float64;
|
||||
lng @1 :Float64;
|
||||
}
|
||||
|
||||
struct Segment @0xa5b39b4fc4d7da3f {
|
||||
from @0 :LatLng;
|
||||
to @1 :LatLng;
|
||||
updateTime @2 :Int32;
|
||||
distance @3 :Int32;
|
||||
crossTime @4 :Int32;
|
||||
exitNo @5 :Int32;
|
||||
instruction @6 :Instruction;
|
||||
|
||||
parts @7 :List(LatLng);
|
||||
|
||||
enum Instruction @0xc5417a637451246f {
|
||||
turnLeft @0;
|
||||
turnRight @1;
|
||||
keepLeft @2;
|
||||
keepRight @3;
|
||||
straight @4;
|
||||
roundaboutExitNumber @5;
|
||||
roundaboutExit @6;
|
||||
roundaboutTurnLeft @7;
|
||||
unkn8 @8;
|
||||
roundaboutStraight @9;
|
||||
unkn10 @10;
|
||||
roundaboutTurnRight @11;
|
||||
unkn12 @12;
|
||||
roundaboutUturn @13;
|
||||
unkn14 @14;
|
||||
arrive @15;
|
||||
exitLeft @16;
|
||||
exitRight @17;
|
||||
unkn18 @18;
|
||||
uturn @19;
|
||||
# ...
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct TrafficEvent @0xacfa74a094e62626 {
|
||||
type @0 :Type;
|
||||
distance @1 :Float32;
|
||||
action @2 :Action;
|
||||
resuming @3 :Bool;
|
||||
|
||||
enum Type @0xd85d75253435bf4b {
|
||||
stopSign @0;
|
||||
lightRed @1;
|
||||
lightYellow @2;
|
||||
lightGreen @3;
|
||||
stopLight @4;
|
||||
}
|
||||
|
||||
enum Action @0xa6f6ce72165ccb49 {
|
||||
none @0;
|
||||
yield @1;
|
||||
stop @2;
|
||||
resumeReady @3;
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
|
||||
struct AndroidGnss @0xdfdf30d03fc485bd {
|
||||
union {
|
||||
measurements @0 :Measurements;
|
||||
navigationMessage @1 :NavigationMessage;
|
||||
}
|
||||
|
||||
struct Measurements @0xa20710d4f428d6cd {
|
||||
clock @0 :Clock;
|
||||
measurements @1 :List(Measurement);
|
||||
|
||||
struct Clock @0xa0e27b453a38f450 {
|
||||
timeNanos @0 :Int64;
|
||||
hardwareClockDiscontinuityCount @1 :Int32;
|
||||
|
||||
hasTimeUncertaintyNanos @2 :Bool;
|
||||
timeUncertaintyNanos @3 :Float64;
|
||||
|
||||
hasLeapSecond @4 :Bool;
|
||||
leapSecond @5 :Int32;
|
||||
|
||||
hasFullBiasNanos @6 :Bool;
|
||||
fullBiasNanos @7 :Int64;
|
||||
|
||||
hasBiasNanos @8 :Bool;
|
||||
biasNanos @9 :Float64;
|
||||
|
||||
hasBiasUncertaintyNanos @10 :Bool;
|
||||
biasUncertaintyNanos @11 :Float64;
|
||||
|
||||
hasDriftNanosPerSecond @12 :Bool;
|
||||
driftNanosPerSecond @13 :Float64;
|
||||
|
||||
hasDriftUncertaintyNanosPerSecond @14 :Bool;
|
||||
driftUncertaintyNanosPerSecond @15 :Float64;
|
||||
}
|
||||
|
||||
struct Measurement @0xd949bf717d77614d {
|
||||
svId @0 :Int32;
|
||||
constellation @1 :Constellation;
|
||||
|
||||
timeOffsetNanos @2 :Float64;
|
||||
state @3 :Int32;
|
||||
receivedSvTimeNanos @4 :Int64;
|
||||
receivedSvTimeUncertaintyNanos @5 :Int64;
|
||||
cn0DbHz @6 :Float64;
|
||||
pseudorangeRateMetersPerSecond @7 :Float64;
|
||||
pseudorangeRateUncertaintyMetersPerSecond @8 :Float64;
|
||||
accumulatedDeltaRangeState @9 :Int32;
|
||||
accumulatedDeltaRangeMeters @10 :Float64;
|
||||
accumulatedDeltaRangeUncertaintyMeters @11 :Float64;
|
||||
|
||||
hasCarrierFrequencyHz @12 :Bool;
|
||||
carrierFrequencyHz @13 :Float32;
|
||||
hasCarrierCycles @14 :Bool;
|
||||
carrierCycles @15 :Int64;
|
||||
hasCarrierPhase @16 :Bool;
|
||||
carrierPhase @17 :Float64;
|
||||
hasCarrierPhaseUncertainty @18 :Bool;
|
||||
carrierPhaseUncertainty @19 :Float64;
|
||||
hasSnrInDb @20 :Bool;
|
||||
snrInDb @21 :Float64;
|
||||
|
||||
multipathIndicator @22 :MultipathIndicator;
|
||||
|
||||
enum Constellation @0x9ef1f3ff0deb5ffb {
|
||||
unknown @0;
|
||||
gps @1;
|
||||
sbas @2;
|
||||
glonass @3;
|
||||
qzss @4;
|
||||
beidou @5;
|
||||
galileo @6;
|
||||
}
|
||||
|
||||
enum State @0xcbb9490adce12d72 {
|
||||
unknown @0;
|
||||
codeLock @1;
|
||||
bitSync @2;
|
||||
subframeSync @3;
|
||||
towDecoded @4;
|
||||
msecAmbiguous @5;
|
||||
symbolSync @6;
|
||||
gloStringSync @7;
|
||||
gloTodDecoded @8;
|
||||
bdsD2BitSync @9;
|
||||
bdsD2SubframeSync @10;
|
||||
galE1bcCodeLock @11;
|
||||
galE1c2ndCodeLock @12;
|
||||
galE1bPageSync @13;
|
||||
sbasSync @14;
|
||||
}
|
||||
|
||||
enum MultipathIndicator @0xc04e7b6231d4caa8 {
|
||||
unknown @0;
|
||||
detected @1;
|
||||
notDetected @2;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct NavigationMessage @0xe2517b083095fd4e {
|
||||
type @0 :Int32;
|
||||
svId @1 :Int32;
|
||||
messageId @2 :Int32;
|
||||
submessageId @3 :Int32;
|
||||
data @4 :Data;
|
||||
status @5 :Status;
|
||||
|
||||
enum Status @0xec1ff7996b35366f {
|
||||
unknown @0;
|
||||
parityPassed @1;
|
||||
parityRebuilt @2;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct LidarPts @0xe3d6685d4e9d8f7a {
|
||||
r @0 :List(UInt16); # uint16 m*500.0
|
||||
theta @1 :List(UInt16); # uint16 deg*100.0
|
||||
reflect @2 :List(UInt8); # uint8 0-255
|
||||
|
||||
# For storing out of file.
|
||||
idx @3 :UInt64;
|
||||
|
||||
# For storing in file
|
||||
pkt @4 :Data;
|
||||
}
|
||||
|
||||
|
||||
+2645
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,259 @@
|
||||
# must be built with scons
|
||||
from msgq.ipc_pyx import Context, Poller, SubSocket, PubSocket, SocketEventHandle, toggle_fake_events, \
|
||||
set_fake_prefix, get_fake_prefix, delete_fake_prefix, wait_for_one_event
|
||||
from msgq.ipc_pyx import MultiplePublishersError, IpcError
|
||||
from msgq import fake_event_handle, pub_sock, sub_sock, drain_sock_raw
|
||||
import msgq
|
||||
|
||||
import os
|
||||
import capnp
|
||||
import time
|
||||
|
||||
from typing import Optional, List, Union, Dict
|
||||
|
||||
from cereal import log
|
||||
from cereal.services import SERVICE_LIST
|
||||
from openpilot.common.util import MovingAverage
|
||||
|
||||
NO_TRAVERSAL_LIMIT = 2**64-1
|
||||
|
||||
|
||||
def reset_context():
|
||||
msgq.context = Context()
|
||||
|
||||
|
||||
def log_from_bytes(dat: bytes, struct: capnp.lib.capnp._StructModule = log.Event) -> capnp.lib.capnp._DynamicStructReader:
|
||||
with struct.from_bytes(dat, traversal_limit_in_words=NO_TRAVERSAL_LIMIT) as msg:
|
||||
return msg
|
||||
|
||||
|
||||
def new_message(service: Optional[str], size: Optional[int] = None, **kwargs) -> capnp.lib.capnp._DynamicStructBuilder:
|
||||
args = {
|
||||
'valid': False,
|
||||
'logMonoTime': int(time.monotonic() * 1e9),
|
||||
**kwargs
|
||||
}
|
||||
dat = log.Event.new_message(**args)
|
||||
if service is not None:
|
||||
if size is None:
|
||||
dat.init(service)
|
||||
else:
|
||||
dat.init(service, size)
|
||||
return dat
|
||||
|
||||
|
||||
def drain_sock(sock: SubSocket, wait_for_one: bool = False) -> List[capnp.lib.capnp._DynamicStructReader]:
|
||||
"""Receive all message currently available on the queue"""
|
||||
msgs = drain_sock_raw(sock, wait_for_one=wait_for_one)
|
||||
return [log_from_bytes(m) for m in msgs]
|
||||
|
||||
|
||||
# TODO: print when we drop packets?
|
||||
def recv_sock(sock: SubSocket, wait: bool = False) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
"""Same as drain sock, but only returns latest message. Consider using conflate instead."""
|
||||
dat = None
|
||||
|
||||
while 1:
|
||||
if wait and dat is None:
|
||||
recv = sock.receive()
|
||||
else:
|
||||
recv = sock.receive(non_blocking=True)
|
||||
|
||||
if recv is None: # Timeout hit
|
||||
break
|
||||
|
||||
dat = recv
|
||||
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one(sock: SubSocket) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
dat = sock.receive()
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one_or_none(sock: SubSocket) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
dat = sock.receive(non_blocking=True)
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one_retry(sock: SubSocket) -> capnp.lib.capnp._DynamicStructReader:
|
||||
"""Keep receiving until we get a message"""
|
||||
while True:
|
||||
dat = sock.receive()
|
||||
if dat is not None:
|
||||
return log_from_bytes(dat)
|
||||
|
||||
|
||||
class FrequencyTracker:
|
||||
def __init__(self, service_freq: float, update_freq: float, is_poll: bool):
|
||||
freq = max(min(service_freq, update_freq), 1.)
|
||||
if is_poll:
|
||||
min_freq = max_freq = freq
|
||||
else:
|
||||
max_freq = min(freq, update_freq)
|
||||
if service_freq >= 2 * update_freq:
|
||||
min_freq = update_freq
|
||||
elif update_freq >= 2* service_freq:
|
||||
min_freq = freq
|
||||
else:
|
||||
min_freq = min(freq, freq / 2.)
|
||||
|
||||
self.min_freq = min_freq * 0.8
|
||||
self.max_freq = max_freq * 1.2
|
||||
self.avg_dt = MovingAverage(int(10 * freq))
|
||||
self.recent_avg_dt = MovingAverage(int(freq))
|
||||
self.prev_time = 0.0
|
||||
|
||||
def record_recv_time(self, cur_time: float) -> None:
|
||||
# TODO: Handle case where cur_time is less than prev_time
|
||||
if self.prev_time > 1e-5:
|
||||
dt = cur_time - self.prev_time
|
||||
|
||||
self.avg_dt.add_value(dt)
|
||||
self.recent_avg_dt.add_value(dt)
|
||||
|
||||
self.prev_time = cur_time
|
||||
|
||||
@property
|
||||
def valid(self) -> bool:
|
||||
if self.avg_dt.count == 0:
|
||||
return False
|
||||
|
||||
avg_freq = 1.0 / self.avg_dt.get_average()
|
||||
if self.min_freq <= avg_freq <= self.max_freq:
|
||||
return True
|
||||
|
||||
avg_freq_recent = 1.0 / self.recent_avg_dt.get_average()
|
||||
return self.min_freq <= avg_freq_recent <= self.max_freq
|
||||
|
||||
|
||||
class SubMaster:
|
||||
def __init__(self, services: List[str], poll: Optional[str] = None,
|
||||
ignore_alive: Optional[List[str]] = None, ignore_avg_freq: Optional[List[str]] = None,
|
||||
ignore_valid: Optional[List[str]] = None, addr: str = "127.0.0.1", frequency: Optional[float] = None):
|
||||
self.frame = -1
|
||||
self.services = services
|
||||
self.seen = {s: False for s in services}
|
||||
self.updated = {s: False for s in services}
|
||||
self.recv_time = {s: 0. for s in services}
|
||||
self.recv_frame = {s: 0 for s in services}
|
||||
self.alive = {s: False for s in services}
|
||||
self.freq_ok = {s: False for s in services}
|
||||
self.sock = {}
|
||||
self.data = {}
|
||||
self.valid = {}
|
||||
self.logMonoTime = {}
|
||||
|
||||
self.freq_tracker: Dict[str, FrequencyTracker] = {}
|
||||
self.poller = Poller()
|
||||
polled_services = set([poll, ] if poll is not None else services)
|
||||
self.non_polled_services = set(services) - polled_services
|
||||
|
||||
self.ignore_average_freq = [] if ignore_avg_freq is None else ignore_avg_freq
|
||||
self.ignore_alive = [] if ignore_alive is None else ignore_alive
|
||||
self.ignore_valid = [] if ignore_valid is None else ignore_valid
|
||||
|
||||
self.simulation = bool(int(os.getenv("SIMULATION", "0")))
|
||||
|
||||
# if freq and poll aren't specified, assume the max to be conservative
|
||||
assert frequency is None or poll is None, "Do not specify 'frequency' - frequency of the polled service will be used."
|
||||
self.update_freq = frequency or max([SERVICE_LIST[s].frequency for s in polled_services])
|
||||
|
||||
for s in services:
|
||||
p = self.poller if s not in self.non_polled_services else None
|
||||
self.sock[s] = sub_sock(s, poller=p, addr=addr, conflate=True)
|
||||
|
||||
try:
|
||||
data = new_message(s)
|
||||
except capnp.lib.capnp.KjException:
|
||||
data = new_message(s, 0) # lists
|
||||
|
||||
self.data[s] = getattr(data.as_reader(), s)
|
||||
self.logMonoTime[s] = 0
|
||||
self.valid[s] = False
|
||||
self.freq_tracker[s] = FrequencyTracker(SERVICE_LIST[s].frequency, self.update_freq, s == poll)
|
||||
|
||||
def __getitem__(self, s: str) -> capnp.lib.capnp._DynamicStructReader:
|
||||
return self.data[s]
|
||||
|
||||
def _check_avg_freq(self, s: str) -> bool:
|
||||
return SERVICE_LIST[s].frequency > 0.99 and (s not in self.ignore_average_freq) and (s not in self.ignore_alive)
|
||||
|
||||
def update(self, timeout: int = 100) -> None:
|
||||
msgs = []
|
||||
for sock in self.poller.poll(timeout):
|
||||
msgs.append(recv_one_or_none(sock))
|
||||
|
||||
# non-blocking receive for non-polled sockets
|
||||
for s in self.non_polled_services:
|
||||
msgs.append(recv_one_or_none(self.sock[s]))
|
||||
self.update_msgs(time.monotonic(), msgs)
|
||||
|
||||
def update_msgs(self, cur_time: float, msgs: List[capnp.lib.capnp._DynamicStructReader]) -> None:
|
||||
self.frame += 1
|
||||
self.updated = dict.fromkeys(self.services, False)
|
||||
for msg in msgs:
|
||||
if msg is None:
|
||||
continue
|
||||
|
||||
s = msg.which()
|
||||
self.seen[s] = True
|
||||
self.updated[s] = True
|
||||
|
||||
self.freq_tracker[s].record_recv_time(cur_time)
|
||||
self.recv_time[s] = cur_time
|
||||
self.recv_frame[s] = self.frame
|
||||
self.data[s] = getattr(msg, s)
|
||||
self.logMonoTime[s] = msg.logMonoTime
|
||||
self.valid[s] = msg.valid
|
||||
|
||||
for s in self.services:
|
||||
if SERVICE_LIST[s].frequency > 1e-5 and not self.simulation:
|
||||
# alive if delay is within 10x the expected frequency
|
||||
self.alive[s] = (cur_time - self.recv_time[s]) < (10. / SERVICE_LIST[s].frequency)
|
||||
self.freq_ok[s] = self.freq_tracker[s].valid
|
||||
else:
|
||||
self.freq_ok[s] = True
|
||||
self.alive[s] = self.seen[s] if self.simulation else True
|
||||
|
||||
def all_alive(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.alive[s] for s in (service_list or self.services) if s not in self.ignore_alive)
|
||||
|
||||
def all_freq_ok(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.freq_ok[s] for s in (service_list or self.services) if self._check_avg_freq(s))
|
||||
|
||||
def all_valid(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.valid[s] for s in (service_list or self.services) if s not in self.ignore_valid)
|
||||
|
||||
def all_checks(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return self.all_alive(service_list) and self.all_freq_ok(service_list) and self.all_valid(service_list)
|
||||
|
||||
|
||||
class PubMaster:
|
||||
def __init__(self, services: List[str]):
|
||||
self.sock = {}
|
||||
for s in services:
|
||||
self.sock[s] = pub_sock(s)
|
||||
|
||||
def send(self, s: str, dat: Union[bytes, capnp.lib.capnp._DynamicStructBuilder]) -> None:
|
||||
if not isinstance(dat, bytes):
|
||||
dat = dat.to_bytes()
|
||||
self.sock[s].send(dat)
|
||||
|
||||
def wait_for_readers_to_update(self, s: str, timeout: int, dt: float = 0.05) -> bool:
|
||||
for _ in range(int(timeout*(1./dt))):
|
||||
if self.sock[s].all_readers_updated():
|
||||
return True
|
||||
time.sleep(dt)
|
||||
return False
|
||||
|
||||
def all_readers_updated(self, s: str) -> bool:
|
||||
return self.sock[s].all_readers_updated() # type: ignore
|
||||
Executable
BIN
Binary file not shown.
@@ -0,0 +1,102 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstddef>
|
||||
#include <map>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
#include <utility>
|
||||
|
||||
#include <capnp/serialize.h>
|
||||
|
||||
#include "cereal/gen/cpp/log.capnp.h"
|
||||
#include "common/timing.h"
|
||||
#include "msgq/ipc.h"
|
||||
|
||||
class SubMaster {
|
||||
public:
|
||||
SubMaster(const std::vector<const char *> &service_list, const std::vector<const char *> &poll = {},
|
||||
const char *address = nullptr, const std::vector<const char *> &ignore_alive = {});
|
||||
void update(int timeout = 1000);
|
||||
void update_msgs(uint64_t current_time, const std::vector<std::pair<std::string, cereal::Event::Reader>> &messages);
|
||||
inline bool allAlive(const std::vector<const char *> &service_list = {}) { return all_(service_list, false, true); }
|
||||
inline bool allValid(const std::vector<const char *> &service_list = {}) { return all_(service_list, true, false); }
|
||||
inline bool allAliveAndValid(const std::vector<const char *> &service_list = {}) { return all_(service_list, true, true); }
|
||||
void drain();
|
||||
~SubMaster();
|
||||
|
||||
uint64_t frame = 0;
|
||||
bool updated(const char *name) const;
|
||||
bool alive(const char *name) const;
|
||||
bool valid(const char *name) const;
|
||||
uint64_t rcv_frame(const char *name) const;
|
||||
uint64_t rcv_time(const char *name) const;
|
||||
cereal::Event::Reader &operator[](const char *name) const;
|
||||
|
||||
private:
|
||||
bool all_(const std::vector<const char *> &service_list, bool valid, bool alive);
|
||||
Poller *poller_ = nullptr;
|
||||
struct SubMessage;
|
||||
std::map<SubSocket *, SubMessage *> messages_;
|
||||
std::map<std::string, SubMessage *> services_;
|
||||
};
|
||||
|
||||
class MessageBuilder : public capnp::MallocMessageBuilder {
|
||||
public:
|
||||
MessageBuilder() = default;
|
||||
|
||||
cereal::Event::Builder initEvent(bool valid = true) {
|
||||
cereal::Event::Builder event = initRoot<cereal::Event>();
|
||||
event.setLogMonoTime(nanos_since_boot());
|
||||
event.setValid(valid);
|
||||
return event;
|
||||
}
|
||||
|
||||
kj::ArrayPtr<capnp::byte> toBytes() {
|
||||
heapArray_ = capnp::messageToFlatArray(*this);
|
||||
return heapArray_.asBytes();
|
||||
}
|
||||
|
||||
size_t getSerializedSize() {
|
||||
return capnp::computeSerializedSizeInWords(*this) * sizeof(capnp::word);
|
||||
}
|
||||
|
||||
int serializeToBuffer(unsigned char *buffer, size_t buffer_size) {
|
||||
size_t serialized_size = getSerializedSize();
|
||||
if (serialized_size > buffer_size) { return -1; }
|
||||
kj::ArrayOutputStream out(kj::ArrayPtr<capnp::byte>(buffer, buffer_size));
|
||||
capnp::writeMessage(out, *this);
|
||||
return serialized_size;
|
||||
}
|
||||
|
||||
private:
|
||||
kj::Array<capnp::word> heapArray_;
|
||||
};
|
||||
|
||||
class PubMaster {
|
||||
public:
|
||||
PubMaster(const std::vector<const char *> &service_list);
|
||||
inline int send(const char *name, capnp::byte *data, size_t size) { return sockets_.at(name)->send((char *)data, size); }
|
||||
int send(const char *name, MessageBuilder &msg);
|
||||
~PubMaster();
|
||||
|
||||
private:
|
||||
std::map<std::string, PubSocket *> sockets_;
|
||||
};
|
||||
|
||||
class AlignedBuffer {
|
||||
public:
|
||||
kj::ArrayPtr<const capnp::word> align(const char *data, const size_t size) {
|
||||
words_size = size / sizeof(capnp::word) + 1;
|
||||
if (aligned_buf.size() < words_size) {
|
||||
aligned_buf = kj::heapArray<capnp::word>(words_size < 512 ? 512 : words_size);
|
||||
}
|
||||
memcpy(aligned_buf.begin(), data, size);
|
||||
return aligned_buf.slice(0, words_size);
|
||||
}
|
||||
inline kj::ArrayPtr<const capnp::word> align(Message *m) {
|
||||
return align(m->getData(), m->getSize());
|
||||
}
|
||||
private:
|
||||
kj::Array<capnp::word> aligned_buf;
|
||||
size_t words_size;
|
||||
};
|
||||
@@ -0,0 +1,37 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <map>
|
||||
#include <memory>
|
||||
#include <mutex>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
|
||||
#define private public
|
||||
#include "msgq/impl_msgq.h"
|
||||
#include "msgq/impl_zmq.h"
|
||||
|
||||
class MsgqToZmq {
|
||||
public:
|
||||
MsgqToZmq() {}
|
||||
void run(const std::vector<std::string> &endpoints, const std::string &ip);
|
||||
|
||||
protected:
|
||||
void registerSockets();
|
||||
void zmqMonitorThread();
|
||||
|
||||
struct SocketPair {
|
||||
std::string endpoint;
|
||||
std::unique_ptr<ZMQPubSocket> pub_sock;
|
||||
std::unique_ptr<MSGQSubSocket> sub_sock;
|
||||
int connected_clients = 0;
|
||||
};
|
||||
|
||||
std::unique_ptr<MSGQContext> msgq_context;
|
||||
std::unique_ptr<ZMQContext> zmq_context;
|
||||
std::mutex mutex;
|
||||
std::condition_variable cv;
|
||||
std::unique_ptr<MSGQPoller> msgq_poller;
|
||||
std::map<SubSocket *, ZMQPubSocket *> sub2pub;
|
||||
std::vector<SocketPair> socket_pairs;
|
||||
};
|
||||
@@ -0,0 +1,185 @@
|
||||
import os
|
||||
import capnp
|
||||
import multiprocessing
|
||||
import numbers
|
||||
import random
|
||||
import threading
|
||||
import time
|
||||
from parameterized import parameterized
|
||||
import pytest
|
||||
|
||||
from cereal import log, car
|
||||
import cereal.messaging as messaging
|
||||
from cereal.services import SERVICE_LIST
|
||||
|
||||
events = [evt for evt in log.Event.schema.union_fields if evt in SERVICE_LIST.keys()]
|
||||
|
||||
def random_sock():
|
||||
return random.choice(events)
|
||||
|
||||
def random_socks(num_socks=10):
|
||||
return list({random_sock() for _ in range(num_socks)})
|
||||
|
||||
def random_bytes(length=1000):
|
||||
return bytes([random.randrange(0xFF) for _ in range(length)])
|
||||
|
||||
def zmq_sleep(t=1):
|
||||
if "ZMQ" in os.environ:
|
||||
time.sleep(t)
|
||||
|
||||
|
||||
# TODO: this should take any capnp struct and returrn a msg with random populated data
|
||||
def random_carstate():
|
||||
fields = ["vEgo", "aEgo", "gas", "steeringAngleDeg"]
|
||||
msg = messaging.new_message("carState")
|
||||
cs = msg.carState
|
||||
for f in fields:
|
||||
setattr(cs, f, random.random() * 10)
|
||||
return msg
|
||||
|
||||
# TODO: this should compare any capnp structs
|
||||
def assert_carstate(cs1, cs2):
|
||||
for f in car.CarState.schema.non_union_fields:
|
||||
# TODO: check all types
|
||||
val1, val2 = getattr(cs1, f), getattr(cs2, f)
|
||||
if isinstance(val1, numbers.Number):
|
||||
assert val1 == val2, f"{f}: sent '{val1}' vs recvd '{val2}'"
|
||||
|
||||
def delayed_send(delay, sock, dat):
|
||||
def send_func():
|
||||
sock.send(dat)
|
||||
threading.Timer(delay, send_func).start()
|
||||
|
||||
|
||||
class TestMessaging:
|
||||
def setUp(self):
|
||||
# TODO: ZMQ tests are too slow; all sleeps will need to be
|
||||
# replaced with logic to block on the necessary condition
|
||||
if "ZMQ" in os.environ:
|
||||
pytest.skip()
|
||||
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep()
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_new_message(self, evt):
|
||||
try:
|
||||
msg = messaging.new_message(evt)
|
||||
except capnp.lib.capnp.KjException:
|
||||
msg = messaging.new_message(evt, random.randrange(200))
|
||||
assert (time.monotonic() - msg.logMonoTime) < 0.1
|
||||
assert not msg.valid
|
||||
assert evt == msg.which()
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_pub_sock(self, evt):
|
||||
messaging.pub_sock(evt)
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_sub_sock(self, evt):
|
||||
messaging.sub_sock(evt)
|
||||
|
||||
@parameterized.expand([
|
||||
(messaging.drain_sock, capnp._DynamicStructReader),
|
||||
(messaging.drain_sock_raw, bytes),
|
||||
])
|
||||
def test_drain_sock(self, func, expected_type):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=1000)
|
||||
zmq_sleep()
|
||||
|
||||
# no wait and no msgs in queue
|
||||
msgs = func(sub_sock)
|
||||
assert isinstance(msgs, list)
|
||||
assert len(msgs) == 0
|
||||
|
||||
# no wait but msgs are queued up
|
||||
num_msgs = random.randrange(3, 10)
|
||||
for _ in range(num_msgs):
|
||||
pub_sock.send(messaging.new_message(sock).to_bytes())
|
||||
time.sleep(0.1)
|
||||
msgs = func(sub_sock)
|
||||
assert isinstance(msgs, list)
|
||||
assert all(isinstance(msg, expected_type) for msg in msgs)
|
||||
assert len(msgs) == num_msgs
|
||||
|
||||
def test_recv_sock(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=100)
|
||||
zmq_sleep()
|
||||
|
||||
# no wait and no msg in queue, socket should timeout
|
||||
recvd = messaging.recv_sock(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# no wait and one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
time.sleep(0.01)
|
||||
recvd = messaging.recv_sock(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
# https://github.com/python/mypy/issues/13038
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
def test_recv_one(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=1000)
|
||||
zmq_sleep()
|
||||
|
||||
# no msg in queue, socket should timeout
|
||||
recvd = messaging.recv_one(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
recvd = messaging.recv_one(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
@pytest.mark.xfail(condition="ZMQ" in os.environ, reason='ZMQ detected')
|
||||
def test_recv_one_or_none(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock)
|
||||
zmq_sleep()
|
||||
|
||||
# no msg in queue, socket shouldn't block
|
||||
recvd = messaging.recv_one_or_none(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
recvd = messaging.recv_one_or_none(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
def test_recv_one_retry(self):
|
||||
sock = "carState"
|
||||
sock_timeout = 0.1
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=round(sock_timeout*1000))
|
||||
zmq_sleep()
|
||||
|
||||
# this test doesn't work with ZMQ since multiprocessing interrupts it
|
||||
if "ZMQ" not in os.environ:
|
||||
# wait 5 socket timeouts and make sure it's still retrying
|
||||
p = multiprocessing.Process(target=messaging.recv_one_retry, args=(sub_sock,))
|
||||
p.start()
|
||||
time.sleep(sock_timeout*5)
|
||||
assert p.is_alive()
|
||||
p.terminate()
|
||||
|
||||
# wait 5 socket timeouts before sending
|
||||
msg = random_carstate()
|
||||
delayed_send(sock_timeout*5, pub_sock, msg.to_bytes())
|
||||
start_time = time.monotonic()
|
||||
recvd = messaging.recv_one_retry(sub_sock)
|
||||
assert (time.monotonic() - start_time) >= sock_timeout*5
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
@@ -0,0 +1,156 @@
|
||||
import random
|
||||
import time
|
||||
from typing import Sized, cast
|
||||
|
||||
import cereal.messaging as messaging
|
||||
from cereal.messaging.tests.test_messaging import events, random_sock, random_socks, \
|
||||
random_bytes, random_carstate, assert_carstate, \
|
||||
zmq_sleep
|
||||
|
||||
|
||||
class TestSubMaster:
|
||||
|
||||
def setup_method(self):
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep(3)
|
||||
|
||||
def test_init(self):
|
||||
sm = messaging.SubMaster(events)
|
||||
for p in [sm.updated, sm.recv_time, sm.recv_frame, sm.alive,
|
||||
sm.sock, sm.data, sm.logMonoTime, sm.valid]:
|
||||
assert len(cast(Sized, p)) == len(events)
|
||||
|
||||
def test_init_state(self):
|
||||
socks = random_socks()
|
||||
sm = messaging.SubMaster(socks)
|
||||
assert sm.frame == -1
|
||||
assert not any(sm.updated.values())
|
||||
assert not any(sm.alive.values())
|
||||
assert all(t == 0. for t in sm.recv_time.values())
|
||||
assert all(f == 0 for f in sm.recv_frame.values())
|
||||
assert all(t == 0 for t in sm.logMonoTime.values())
|
||||
|
||||
for p in [sm.updated, sm.recv_time, sm.recv_frame, sm.alive,
|
||||
sm.sock, sm.data, sm.logMonoTime, sm.valid]:
|
||||
assert len(cast(Sized, p)) == len(socks)
|
||||
|
||||
def test_getitem(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
zmq_sleep()
|
||||
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
sm.update(1000)
|
||||
assert_carstate(msg.carState, sm[sock])
|
||||
|
||||
# TODO: break this test up to individually test SubMaster.update and SubMaster.update_msgs
|
||||
def test_update(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
zmq_sleep()
|
||||
|
||||
for i in range(10):
|
||||
msg = messaging.new_message(sock)
|
||||
pub_sock.send(msg.to_bytes())
|
||||
sm.update(1000)
|
||||
assert sm.frame == i
|
||||
assert all(sm.updated.values())
|
||||
|
||||
def test_update_timeout(self):
|
||||
sock = random_sock()
|
||||
sm = messaging.SubMaster([sock,])
|
||||
timeout = random.randrange(1000, 3000)
|
||||
start_time = time.monotonic()
|
||||
sm.update(timeout)
|
||||
t = time.monotonic() - start_time
|
||||
assert t >= timeout/1000.
|
||||
assert t < 3
|
||||
assert not any(sm.updated.values())
|
||||
|
||||
def test_avg_frequency_checks(self):
|
||||
for poll in (True, False):
|
||||
sm = messaging.SubMaster(["modelV2", "carParams", "carState", "cameraOdometry", "liveCalibration"],
|
||||
poll=("modelV2" if poll else None),
|
||||
frequency=(20. if not poll else None))
|
||||
|
||||
checks = {
|
||||
"carState": (20, 20),
|
||||
"modelV2": (20, 20 if poll else 10),
|
||||
"cameraOdometry": (20, 10),
|
||||
"liveCalibration": (4, 4),
|
||||
"carParams": (None, None),
|
||||
}
|
||||
|
||||
for service, (max_freq, min_freq) in checks.items():
|
||||
if max_freq is not None:
|
||||
assert sm._check_avg_freq(service)
|
||||
assert sm.freq_tracker[service].max_freq == max_freq*1.2
|
||||
assert sm.freq_tracker[service].min_freq == min_freq*0.8
|
||||
else:
|
||||
assert not sm._check_avg_freq(service)
|
||||
|
||||
def test_alive(self):
|
||||
pass
|
||||
|
||||
def test_ignore_alive(self):
|
||||
pass
|
||||
|
||||
def test_valid(self):
|
||||
pass
|
||||
|
||||
# SubMaster should always conflate
|
||||
def test_conflate(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
|
||||
n = 10
|
||||
for i in range(n+1):
|
||||
msg = messaging.new_message(sock)
|
||||
msg.carState.vEgo = i
|
||||
pub_sock.send(msg.to_bytes())
|
||||
time.sleep(0.01)
|
||||
sm.update(1000)
|
||||
assert sm[sock].vEgo == n
|
||||
|
||||
|
||||
class TestPubMaster:
|
||||
|
||||
def setup_method(self):
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep(3)
|
||||
|
||||
def test_init(self):
|
||||
messaging.PubMaster(events)
|
||||
|
||||
def test_send(self):
|
||||
socks = random_socks()
|
||||
pm = messaging.PubMaster(socks)
|
||||
sub_socks = {s: messaging.sub_sock(s, conflate=True, timeout=1000) for s in socks}
|
||||
zmq_sleep()
|
||||
|
||||
# PubMaster accepts either a capnp msg builder or bytes
|
||||
for capnp in [True, False]:
|
||||
for i in range(100):
|
||||
sock = socks[i % len(socks)]
|
||||
|
||||
if capnp:
|
||||
try:
|
||||
msg = messaging.new_message(sock)
|
||||
except Exception:
|
||||
msg = messaging.new_message(sock, random.randrange(50))
|
||||
else:
|
||||
msg = random_bytes()
|
||||
|
||||
pm.send(sock, msg)
|
||||
recvd = sub_socks[sock].receive()
|
||||
|
||||
if capnp:
|
||||
msg.clear_write_flag()
|
||||
msg = msg.to_bytes()
|
||||
assert msg == recvd, i
|
||||
@@ -0,0 +1,21 @@
|
||||
import os
|
||||
import tempfile
|
||||
from typing import Dict
|
||||
from parameterized import parameterized
|
||||
|
||||
import cereal.services as services
|
||||
from cereal.services import SERVICE_LIST
|
||||
|
||||
|
||||
class TestServices:
|
||||
|
||||
@parameterized.expand(SERVICE_LIST.keys())
|
||||
def test_services(self, s):
|
||||
service = SERVICE_LIST[s]
|
||||
assert service.frequency <= 104
|
||||
assert service.decimation != 0
|
||||
|
||||
def test_generated_header(self):
|
||||
with tempfile.NamedTemporaryFile(suffix=".h") as f:
|
||||
ret = os.system(f"python3 {services.__file__} > {f.name} && clang++ {f.name} -std=c++11")
|
||||
assert ret == 0, "generated services header is not valid C"
|
||||
@@ -0,0 +1,93 @@
|
||||
/* THIS IS AN AUTOGENERATED FILE, PLEASE EDIT services.py */
|
||||
#ifndef __SERVICES_H
|
||||
#define __SERVICES_H
|
||||
#include <map>
|
||||
#include <string>
|
||||
struct service { std::string name; bool should_log; int frequency; int decimation; };
|
||||
static std::map<std::string, service> services = {
|
||||
{ "gyroscope", {"gyroscope", true, 104, 104}},
|
||||
{ "gyroscope2", {"gyroscope2", true, 100, 100}},
|
||||
{ "accelerometer", {"accelerometer", true, 104, 104}},
|
||||
{ "accelerometer2", {"accelerometer2", true, 100, 100}},
|
||||
{ "magnetometer", {"magnetometer", true, 25, -1}},
|
||||
{ "lightSensor", {"lightSensor", true, 100, 100}},
|
||||
{ "temperatureSensor", {"temperatureSensor", true, 2, 200}},
|
||||
{ "temperatureSensor2", {"temperatureSensor2", true, 2, 200}},
|
||||
{ "gpsNMEA", {"gpsNMEA", true, 9, -1}},
|
||||
{ "deviceState", {"deviceState", true, 2, 1}},
|
||||
{ "touch", {"touch", true, 20, 1}},
|
||||
{ "can", {"can", true, 100, 2053}},
|
||||
{ "controlsState", {"controlsState", true, 100, 10}},
|
||||
{ "selfdriveState", {"selfdriveState", true, 100, 10}},
|
||||
{ "pandaStates", {"pandaStates", true, 10, 1}},
|
||||
{ "peripheralState", {"peripheralState", true, 2, 1}},
|
||||
{ "radarState", {"radarState", true, 20, 5}},
|
||||
{ "roadEncodeIdx", {"roadEncodeIdx", false, 20, 1}},
|
||||
{ "liveTracks", {"liveTracks", true, 20, -1}},
|
||||
{ "sendcan", {"sendcan", true, 100, 139}},
|
||||
{ "logMessage", {"logMessage", true, 0, -1}},
|
||||
{ "errorLogMessage", {"errorLogMessage", true, 0, 1}},
|
||||
{ "liveCalibration", {"liveCalibration", true, 4, 4}},
|
||||
{ "liveTorqueParameters", {"liveTorqueParameters", true, 4, 1}},
|
||||
{ "androidLog", {"androidLog", true, 0, -1}},
|
||||
{ "carState", {"carState", true, 100, 10}},
|
||||
{ "carControl", {"carControl", true, 100, 10}},
|
||||
{ "carOutput", {"carOutput", true, 100, 10}},
|
||||
{ "longitudinalPlan", {"longitudinalPlan", true, 20, 10}},
|
||||
{ "driverAssistance", {"driverAssistance", true, 20, 20}},
|
||||
{ "procLog", {"procLog", true, 0, 15}},
|
||||
{ "gpsLocationExternal", {"gpsLocationExternal", true, 10, 10}},
|
||||
{ "gpsLocation", {"gpsLocation", true, 1, 1}},
|
||||
{ "ubloxGnss", {"ubloxGnss", true, 10, -1}},
|
||||
{ "qcomGnss", {"qcomGnss", true, 2, -1}},
|
||||
{ "gnssMeasurements", {"gnssMeasurements", true, 10, 10}},
|
||||
{ "clocks", {"clocks", true, 0, 1}},
|
||||
{ "ubloxRaw", {"ubloxRaw", true, 20, -1}},
|
||||
{ "livePose", {"livePose", true, 20, 4}},
|
||||
{ "liveParameters", {"liveParameters", true, 20, 5}},
|
||||
{ "cameraOdometry", {"cameraOdometry", true, 20, 10}},
|
||||
{ "thumbnail", {"thumbnail", true, 0, 1}},
|
||||
{ "onroadEvents", {"onroadEvents", true, 1, 1}},
|
||||
{ "carParams", {"carParams", true, 0, 1}},
|
||||
{ "roadCameraState", {"roadCameraState", true, 20, 20}},
|
||||
{ "driverCameraState", {"driverCameraState", true, 20, 20}},
|
||||
{ "driverEncodeIdx", {"driverEncodeIdx", false, 20, 1}},
|
||||
{ "driverStateV2", {"driverStateV2", true, 20, 10}},
|
||||
{ "driverMonitoringState", {"driverMonitoringState", true, 20, 10}},
|
||||
{ "wideRoadEncodeIdx", {"wideRoadEncodeIdx", false, 20, 1}},
|
||||
{ "wideRoadCameraState", {"wideRoadCameraState", true, 20, 20}},
|
||||
{ "drivingModelData", {"drivingModelData", true, 20, 10}},
|
||||
{ "modelV2", {"modelV2", true, 20, -1}},
|
||||
{ "managerState", {"managerState", true, 2, 1}},
|
||||
{ "uploaderState", {"uploaderState", true, 0, 1}},
|
||||
{ "navInstruction", {"navInstruction", true, 1, 10}},
|
||||
{ "navRoute", {"navRoute", true, 0, -1}},
|
||||
{ "navThumbnail", {"navThumbnail", true, 0, -1}},
|
||||
{ "qRoadEncodeIdx", {"qRoadEncodeIdx", false, 20, -1}},
|
||||
{ "userFlag", {"userFlag", true, 0, 1}},
|
||||
{ "microphone", {"microphone", true, 10, 10}},
|
||||
{ "modelManagerSP", {"modelManagerSP", false, 1, 1}},
|
||||
{ "selfdriveStateSP", {"selfdriveStateSP", true, 100, 10}},
|
||||
{ "longitudinalPlanSP", {"longitudinalPlanSP", true, 20, 10}},
|
||||
{ "onroadEventsSP", {"onroadEventsSP", true, 1, 1}},
|
||||
{ "carParamsSP", {"carParamsSP", true, 0, 1}},
|
||||
{ "carControlSP", {"carControlSP", true, 100, 10}},
|
||||
{ "uiDebug", {"uiDebug", true, 0, 1}},
|
||||
{ "testJoystick", {"testJoystick", true, 0, -1}},
|
||||
{ "alertDebug", {"alertDebug", true, 20, 5}},
|
||||
{ "roadEncodeData", {"roadEncodeData", false, 20, -1}},
|
||||
{ "driverEncodeData", {"driverEncodeData", false, 20, -1}},
|
||||
{ "wideRoadEncodeData", {"wideRoadEncodeData", false, 20, -1}},
|
||||
{ "qRoadEncodeData", {"qRoadEncodeData", false, 20, -1}},
|
||||
{ "livestreamWideRoadEncodeIdx", {"livestreamWideRoadEncodeIdx", false, 20, -1}},
|
||||
{ "livestreamRoadEncodeIdx", {"livestreamRoadEncodeIdx", false, 20, -1}},
|
||||
{ "livestreamDriverEncodeIdx", {"livestreamDriverEncodeIdx", false, 20, -1}},
|
||||
{ "livestreamWideRoadEncodeData", {"livestreamWideRoadEncodeData", false, 20, -1}},
|
||||
{ "livestreamRoadEncodeData", {"livestreamRoadEncodeData", false, 20, -1}},
|
||||
{ "livestreamDriverEncodeData", {"livestreamDriverEncodeData", false, 20, -1}},
|
||||
{ "customReservedRawData0", {"customReservedRawData0", true, 0, -1}},
|
||||
{ "customReservedRawData1", {"customReservedRawData1", true, 0, -1}},
|
||||
{ "customReservedRawData2", {"customReservedRawData2", true, 0, -1}},
|
||||
};
|
||||
#endif
|
||||
|
||||
Executable
+130
@@ -0,0 +1,130 @@
|
||||
#!/usr/bin/env python3
|
||||
from typing import Optional
|
||||
|
||||
|
||||
class Service:
|
||||
def __init__(self, should_log: bool, frequency: float, decimation: Optional[int] = None):
|
||||
self.should_log = should_log
|
||||
self.frequency = frequency
|
||||
self.decimation = decimation
|
||||
|
||||
|
||||
_services: dict[str, tuple] = {
|
||||
# service: (should_log, frequency, qlog decimation (optional))
|
||||
# note: the "EncodeIdx" packets will still be in the log
|
||||
"gyroscope": (True, 104., 104),
|
||||
"gyroscope2": (True, 100., 100),
|
||||
"accelerometer": (True, 104., 104),
|
||||
"accelerometer2": (True, 100., 100),
|
||||
"magnetometer": (True, 25.),
|
||||
"lightSensor": (True, 100., 100),
|
||||
"temperatureSensor": (True, 2., 200),
|
||||
"temperatureSensor2": (True, 2., 200),
|
||||
"gpsNMEA": (True, 9.),
|
||||
"deviceState": (True, 2., 1),
|
||||
"touch": (True, 20., 1),
|
||||
"can": (True, 100., 2053), # decimation gives ~3 msgs in a full segment
|
||||
"controlsState": (True, 100., 10),
|
||||
"selfdriveState": (True, 100., 10),
|
||||
"pandaStates": (True, 10., 1),
|
||||
"peripheralState": (True, 2., 1),
|
||||
"radarState": (True, 20., 5),
|
||||
"roadEncodeIdx": (False, 20., 1),
|
||||
"liveTracks": (True, 20.),
|
||||
"sendcan": (True, 100., 139),
|
||||
"logMessage": (True, 0.),
|
||||
"errorLogMessage": (True, 0., 1),
|
||||
"liveCalibration": (True, 4., 4),
|
||||
"liveTorqueParameters": (True, 4., 1),
|
||||
"androidLog": (True, 0.),
|
||||
"carState": (True, 100., 10),
|
||||
"carControl": (True, 100., 10),
|
||||
"carOutput": (True, 100., 10),
|
||||
"longitudinalPlan": (True, 20., 10),
|
||||
"driverAssistance": (True, 20., 20),
|
||||
"procLog": (True, 0.5, 15),
|
||||
"gpsLocationExternal": (True, 10., 10),
|
||||
"gpsLocation": (True, 1., 1),
|
||||
"ubloxGnss": (True, 10.),
|
||||
"qcomGnss": (True, 2.),
|
||||
"gnssMeasurements": (True, 10., 10),
|
||||
"clocks": (True, 0.1, 1),
|
||||
"ubloxRaw": (True, 20.),
|
||||
"livePose": (True, 20., 4),
|
||||
"liveParameters": (True, 20., 5),
|
||||
"cameraOdometry": (True, 20., 10),
|
||||
"thumbnail": (True, 1 / 60., 1),
|
||||
"onroadEvents": (True, 1., 1),
|
||||
"carParams": (True, 0.02, 1),
|
||||
"roadCameraState": (True, 20., 20),
|
||||
"driverCameraState": (True, 20., 20),
|
||||
"driverEncodeIdx": (False, 20., 1),
|
||||
"driverStateV2": (True, 20., 10),
|
||||
"driverMonitoringState": (True, 20., 10),
|
||||
"wideRoadEncodeIdx": (False, 20., 1),
|
||||
"wideRoadCameraState": (True, 20., 20),
|
||||
"drivingModelData": (True, 20., 10),
|
||||
"modelV2": (True, 20.),
|
||||
"managerState": (True, 2., 1),
|
||||
"uploaderState": (True, 0., 1),
|
||||
"navInstruction": (True, 1., 10),
|
||||
"navRoute": (True, 0.),
|
||||
"navThumbnail": (True, 0.),
|
||||
"qRoadEncodeIdx": (False, 20.),
|
||||
"userFlag": (True, 0., 1),
|
||||
"microphone": (True, 10., 10),
|
||||
|
||||
# sunnypilot
|
||||
"modelManagerSP": (False, 1., 1),
|
||||
"selfdriveStateSP": (True, 100., 10),
|
||||
"longitudinalPlanSP": (True, 20., 10),
|
||||
"onroadEventsSP": (True, 1., 1),
|
||||
"carParamsSP": (True, 0.02, 1),
|
||||
"carControlSP": (True, 100., 10),
|
||||
|
||||
# debug
|
||||
"uiDebug": (True, 0., 1),
|
||||
"testJoystick": (True, 0.),
|
||||
"alertDebug": (True, 20., 5),
|
||||
"roadEncodeData": (False, 20.),
|
||||
"driverEncodeData": (False, 20.),
|
||||
"wideRoadEncodeData": (False, 20.),
|
||||
"qRoadEncodeData": (False, 20.),
|
||||
"livestreamWideRoadEncodeIdx": (False, 20.),
|
||||
"livestreamRoadEncodeIdx": (False, 20.),
|
||||
"livestreamDriverEncodeIdx": (False, 20.),
|
||||
"livestreamWideRoadEncodeData": (False, 20.),
|
||||
"livestreamRoadEncodeData": (False, 20.),
|
||||
"livestreamDriverEncodeData": (False, 20.),
|
||||
"customReservedRawData0": (True, 0.),
|
||||
"customReservedRawData1": (True, 0.),
|
||||
"customReservedRawData2": (True, 0.),
|
||||
}
|
||||
SERVICE_LIST = {name: Service(*vals) for
|
||||
idx, (name, vals) in enumerate(_services.items())}
|
||||
|
||||
|
||||
def build_header():
|
||||
h = ""
|
||||
h += "/* THIS IS AN AUTOGENERATED FILE, PLEASE EDIT services.py */\n"
|
||||
h += "#ifndef __SERVICES_H\n"
|
||||
h += "#define __SERVICES_H\n"
|
||||
|
||||
h += "#include <map>\n"
|
||||
h += "#include <string>\n"
|
||||
|
||||
h += "struct service { std::string name; bool should_log; int frequency; int decimation; };\n"
|
||||
h += "static std::map<std::string, service> services = {\n"
|
||||
for k, v in SERVICE_LIST.items():
|
||||
should_log = "true" if v.should_log else "false"
|
||||
decimation = -1 if v.decimation is None else v.decimation
|
||||
h += ' { "%s", {"%s", %s, %d, %d}},\n' % \
|
||||
(k, k, should_log, v.frequency, decimation)
|
||||
h += "};\n"
|
||||
|
||||
h += "#endif\n"
|
||||
return h
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
print(build_header())
|
||||
+13
@@ -0,0 +1,13 @@
|
||||
comment: false
|
||||
coverage:
|
||||
status:
|
||||
project:
|
||||
default:
|
||||
informational: true
|
||||
patch: off
|
||||
|
||||
ignore:
|
||||
- "**/test_*.py"
|
||||
- "selfdrive/test/**"
|
||||
- "system/version.py" # codecov changes depending on if we are in a branch or not
|
||||
- "tools"
|
||||
@@ -0,0 +1 @@
|
||||
*.cpp
|
||||
@@ -0,0 +1,22 @@
|
||||
from openpilot.common.api.comma_connect import CommaConnectApi
|
||||
|
||||
|
||||
class Api:
|
||||
def __init__(self, dongle_id):
|
||||
self.service = CommaConnectApi(dongle_id)
|
||||
|
||||
def request(self, method, endpoint, **params):
|
||||
return self.service.request(method, endpoint, **params)
|
||||
|
||||
def get(self, *args, **kwargs):
|
||||
return self.service.get(*args, **kwargs)
|
||||
|
||||
def post(self, *args, **kwargs):
|
||||
return self.service.post(*args, **kwargs)
|
||||
|
||||
def get_token(self, expiry_hours=1):
|
||||
return self.service.get_token(expiry_hours)
|
||||
|
||||
|
||||
def api_get(endpoint, method='GET', timeout=None, access_token=None, **params):
|
||||
return CommaConnectApi(None).api_get(endpoint, method, timeout, access_token, **params)
|
||||
@@ -0,0 +1,56 @@
|
||||
import jwt
|
||||
import requests
|
||||
import unicodedata
|
||||
from datetime import datetime, timedelta, UTC
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
from openpilot.system.version import get_version
|
||||
|
||||
|
||||
class BaseApi:
|
||||
def __init__(self, dongle_id, api_host, user_agent="openpilot-"):
|
||||
self.dongle_id = dongle_id
|
||||
self.api_host = api_host
|
||||
self.user_agent = user_agent
|
||||
with open(f'{Paths.persist_root()}/comma/id_rsa') as f:
|
||||
self.private_key = f.read()
|
||||
|
||||
def get(self, *args, **kwargs):
|
||||
return self.request('GET', *args, **kwargs)
|
||||
|
||||
def post(self, *args, **kwargs):
|
||||
return self.request('POST', *args, **kwargs)
|
||||
|
||||
def request(self, method, endpoint, timeout=None, access_token=None, **params):
|
||||
return self.api_get(endpoint, method=method, timeout=timeout, access_token=access_token, **params)
|
||||
|
||||
def _get_token(self, expiry_hours=1, **extra_payload):
|
||||
now = datetime.now(UTC).replace(tzinfo=None)
|
||||
payload = {
|
||||
'identity': self.dongle_id,
|
||||
'nbf': now,
|
||||
'iat': now,
|
||||
'exp': now + timedelta(hours=expiry_hours),
|
||||
**extra_payload
|
||||
}
|
||||
token = jwt.encode(payload, self.private_key, algorithm='RS256')
|
||||
if isinstance(token, bytes):
|
||||
token = token.decode('utf8')
|
||||
return token
|
||||
|
||||
def get_token(self, expiry_hours=1):
|
||||
return self._get_token(expiry_hours)
|
||||
|
||||
def remove_non_ascii_chars(self, text):
|
||||
normalized_text = unicodedata.normalize('NFD', text)
|
||||
ascii_encoded_text = normalized_text.encode('ascii', 'ignore')
|
||||
return ascii_encoded_text.decode()
|
||||
|
||||
def api_get(self, endpoint, method='GET', timeout=None, access_token=None, **params):
|
||||
headers = {}
|
||||
if access_token is not None:
|
||||
headers['Authorization'] = "JWT " + access_token
|
||||
|
||||
version = self.remove_non_ascii_chars(get_version())
|
||||
headers['User-Agent'] = self.user_agent + version
|
||||
|
||||
return requests.request(method, f"{self.api_host}/{endpoint}", timeout=timeout, headers=headers, params=params)
|
||||
@@ -0,0 +1,11 @@
|
||||
import os
|
||||
|
||||
from openpilot.common.api.base import BaseApi
|
||||
|
||||
API_HOST = os.getenv('API_HOST', 'https://api.commadotai.com')
|
||||
|
||||
|
||||
class CommaConnectApi(BaseApi):
|
||||
def __init__(self, dongle_id):
|
||||
super().__init__(dongle_id, API_HOST)
|
||||
self.user_agent = "openpilot-"
|
||||
@@ -0,0 +1,4 @@
|
||||
import os
|
||||
|
||||
|
||||
BASEDIR = os.path.abspath(os.path.join(os.path.dirname(os.path.realpath(__file__)), "../"))
|
||||
@@ -0,0 +1,28 @@
|
||||
#pragma once
|
||||
|
||||
#ifdef __APPLE__
|
||||
#include <OpenCL/cl.h>
|
||||
#else
|
||||
#include <CL/cl.h>
|
||||
#endif
|
||||
|
||||
#include <string>
|
||||
|
||||
#define CL_CHECK(_expr) \
|
||||
do { \
|
||||
assert(CL_SUCCESS == (_expr)); \
|
||||
} while (0)
|
||||
|
||||
#define CL_CHECK_ERR(_expr) \
|
||||
({ \
|
||||
cl_int err = CL_INVALID_VALUE; \
|
||||
__typeof__(_expr) _ret = _expr; \
|
||||
assert(_ret&& err == CL_SUCCESS); \
|
||||
_ret; \
|
||||
})
|
||||
|
||||
cl_device_id cl_get_device_id(cl_device_type device_type);
|
||||
cl_context cl_create_context(cl_device_id device_id);
|
||||
void cl_release_context(cl_context context);
|
||||
cl_program cl_program_from_source(cl_context ctx, cl_device_id device_id, const std::string& src, const char* args = nullptr);
|
||||
cl_program cl_program_from_file(cl_context ctx, cl_device_id device_id, const char* path, const char* args);
|
||||
@@ -0,0 +1,19 @@
|
||||
import numpy as np
|
||||
|
||||
class Conversions:
|
||||
# Speed
|
||||
MPH_TO_KPH = 1.609344
|
||||
KPH_TO_MPH = 1. / MPH_TO_KPH
|
||||
MS_TO_KPH = 3.6
|
||||
KPH_TO_MS = 1. / MS_TO_KPH
|
||||
MS_TO_MPH = MS_TO_KPH * KPH_TO_MPH
|
||||
MPH_TO_MS = MPH_TO_KPH * KPH_TO_MS
|
||||
MS_TO_KNOTS = 1.9438
|
||||
KNOTS_TO_MS = 1. / MS_TO_KNOTS
|
||||
|
||||
# Angle
|
||||
DEG_TO_RAD = np.pi / 180.
|
||||
RAD_TO_DEG = 1. / DEG_TO_RAD
|
||||
|
||||
# Mass
|
||||
LB_TO_KG = 0.453592
|
||||
@@ -0,0 +1,9 @@
|
||||
# remove all keys that end in DEPRECATED
|
||||
def strip_deprecated_keys(d):
|
||||
for k in list(d.keys()):
|
||||
if isinstance(k, str):
|
||||
if k.endswith('DEPRECATED'):
|
||||
d.pop(k)
|
||||
elif isinstance(d[k], dict):
|
||||
strip_deprecated_keys(d[k])
|
||||
return d
|
||||
@@ -0,0 +1,8 @@
|
||||
import platform
|
||||
|
||||
|
||||
def suffix():
|
||||
if platform.system() == "Darwin":
|
||||
return ".dylib"
|
||||
else:
|
||||
return ".so"
|
||||
@@ -0,0 +1,58 @@
|
||||
import io
|
||||
import os
|
||||
import tempfile
|
||||
import contextlib
|
||||
import zstandard as zstd
|
||||
|
||||
LOG_COMPRESSION_LEVEL = 10 # little benefit up to level 15. level ~17 is a small step change
|
||||
|
||||
|
||||
class CallbackReader:
|
||||
"""Wraps a file, but overrides the read method to also
|
||||
call a callback function with the number of bytes read so far."""
|
||||
def __init__(self, f, callback, *args):
|
||||
self.f = f
|
||||
self.callback = callback
|
||||
self.cb_args = args
|
||||
self.total_read = 0
|
||||
|
||||
def __getattr__(self, attr):
|
||||
return getattr(self.f, attr)
|
||||
|
||||
def read(self, *args, **kwargs):
|
||||
chunk = self.f.read(*args, **kwargs)
|
||||
self.total_read += len(chunk)
|
||||
self.callback(*self.cb_args, self.total_read)
|
||||
return chunk
|
||||
|
||||
|
||||
@contextlib.contextmanager
|
||||
def atomic_write_in_dir(path: str, mode: str = 'w', buffering: int = -1, encoding: str = None, newline: str = None,
|
||||
overwrite: bool = False):
|
||||
"""Write to a file atomically using a temporary file in the same directory as the destination file."""
|
||||
dir_name = os.path.dirname(path)
|
||||
|
||||
if not overwrite and os.path.exists(path):
|
||||
raise FileExistsError(f"File '{path}' already exists. To overwrite it, set 'overwrite' to True.")
|
||||
|
||||
with tempfile.NamedTemporaryFile(mode=mode, buffering=buffering, encoding=encoding, newline=newline, dir=dir_name, delete=False) as tmp_file:
|
||||
yield tmp_file
|
||||
tmp_file_name = tmp_file.name
|
||||
os.replace(tmp_file_name, path)
|
||||
|
||||
|
||||
def get_upload_stream(filepath: str, should_compress: bool) -> tuple[io.BufferedIOBase, int]:
|
||||
if not should_compress:
|
||||
file_size = os.path.getsize(filepath)
|
||||
file_stream = open(filepath, "rb")
|
||||
return file_stream, file_size
|
||||
|
||||
# Compress the file on the fly
|
||||
compressed_stream = io.BytesIO()
|
||||
compressor = zstd.ZstdCompressor(level=LOG_COMPRESSION_LEVEL)
|
||||
|
||||
with open(filepath, "rb") as f:
|
||||
compressor.copy_stream(f, compressed_stream)
|
||||
compressed_size = compressed_stream.tell()
|
||||
compressed_stream.seek(0)
|
||||
return compressed_stream, compressed_size
|
||||
@@ -0,0 +1,18 @@
|
||||
class FirstOrderFilter:
|
||||
# first order filter
|
||||
def __init__(self, x0, rc, dt, initialized=True):
|
||||
self.x = x0
|
||||
self.dt = dt
|
||||
self.update_alpha(rc)
|
||||
self.initialized = initialized
|
||||
|
||||
def update_alpha(self, rc):
|
||||
self.alpha = self.dt / (rc + self.dt)
|
||||
|
||||
def update(self, x):
|
||||
if self.initialized:
|
||||
self.x = (1. - self.alpha) * self.x + self.alpha * x
|
||||
else:
|
||||
self.initialized = True
|
||||
self.x = x
|
||||
return self.x
|
||||
@@ -0,0 +1,42 @@
|
||||
from functools import cache
|
||||
import subprocess
|
||||
from openpilot.common.run import run_cmd, run_cmd_default
|
||||
|
||||
|
||||
@cache
|
||||
def get_commit(cwd: str = None, branch: str = "HEAD") -> str:
|
||||
return run_cmd_default(["git", "rev-parse", branch], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_commit_date(cwd: str = None, commit: str = "HEAD") -> str:
|
||||
return run_cmd_default(["git", "show", "--no-patch", "--format='%ct %ci'", commit], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_short_branch(cwd: str = None) -> str:
|
||||
return run_cmd_default(["git", "rev-parse", "--abbrev-ref", "HEAD"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_branch(cwd: str = None) -> str:
|
||||
return run_cmd_default(["git", "rev-parse", "--abbrev-ref", "--symbolic-full-name", "@{u}"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_origin(cwd: str = None) -> str:
|
||||
try:
|
||||
local_branch = run_cmd(["git", "name-rev", "--name-only", "HEAD"], cwd=cwd)
|
||||
tracking_remote = run_cmd(["git", "config", "branch." + local_branch + ".remote"], cwd=cwd)
|
||||
return run_cmd(["git", "config", "remote." + tracking_remote + ".url"], cwd=cwd)
|
||||
except subprocess.CalledProcessError: # Not on a branch, fallback
|
||||
return run_cmd_default(["git", "config", "--get", "remote.origin.url"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_normalized_origin(cwd: str = None) -> str:
|
||||
return get_origin(cwd) \
|
||||
.replace("git@", "", 1) \
|
||||
.replace(".git", "", 1) \
|
||||
.replace("https://", "", 1) \
|
||||
.replace(":", "/", 1)
|
||||
@@ -0,0 +1,33 @@
|
||||
#pragma once
|
||||
|
||||
// Pin definitions
|
||||
#ifdef QCOM2
|
||||
#define GPIO_HUB_RST_N 30
|
||||
#define GPIO_UBLOX_RST_N 32
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 33
|
||||
#define GPIO_GNSS_PWR_EN 34 /* SCHEMATIC LABEL: GPIO_UBLOX_PWR_EN */
|
||||
#define GPIO_STM_RST_N 124
|
||||
#define GPIO_STM_BOOT0 134
|
||||
#define GPIO_BMX_ACCEL_INT 21
|
||||
#define GPIO_BMX_GYRO_INT 23
|
||||
#define GPIO_BMX_MAGN_INT 87
|
||||
#define GPIO_LSM_INT 84
|
||||
#define GPIOCHIP_INT 0
|
||||
#else
|
||||
#define GPIO_HUB_RST_N 0
|
||||
#define GPIO_UBLOX_RST_N 0
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 0
|
||||
#define GPIO_GNSS_PWR_EN 0 /* SCHEMATIC LABEL: GPIO_UBLOX_PWR_EN */
|
||||
#define GPIO_STM_RST_N 0
|
||||
#define GPIO_STM_BOOT0 0
|
||||
#define GPIO_BMX_ACCEL_INT 0
|
||||
#define GPIO_BMX_GYRO_INT 0
|
||||
#define GPIO_BMX_MAGN_INT 0
|
||||
#define GPIO_LSM_INT 0
|
||||
#define GPIOCHIP_INT 0
|
||||
#endif
|
||||
|
||||
int gpio_init(int pin_nr, bool output);
|
||||
int gpio_set(int pin_nr, bool high);
|
||||
|
||||
int gpiochip_get_ro_value_fd(const char* consumer_label, int gpiochiop_id, int pin_nr);
|
||||
@@ -0,0 +1,54 @@
|
||||
import os
|
||||
from functools import cache
|
||||
|
||||
def gpio_init(pin: int, output: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/direction", 'wb') as f:
|
||||
f.write(b"out" if output else b"in")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} direction: {e}")
|
||||
|
||||
def gpio_set(pin: int, high: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'wb') as f:
|
||||
f.write(b"1" if high else b"0")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
def gpio_read(pin: int) -> bool | None:
|
||||
val = None
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'rb') as f:
|
||||
val = bool(int(f.read().strip()))
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
return val
|
||||
|
||||
def gpio_export(pin: int) -> None:
|
||||
if os.path.isdir(f"/sys/class/gpio/gpio{pin}"):
|
||||
return
|
||||
|
||||
try:
|
||||
with open("/sys/class/gpio/export", 'w') as f:
|
||||
f.write(str(pin))
|
||||
except Exception:
|
||||
print(f"Failed to export gpio {pin}")
|
||||
|
||||
@cache
|
||||
def get_irq_action(irq: int) -> list[str]:
|
||||
try:
|
||||
with open(f"/sys/kernel/irq/{irq}/actions") as f:
|
||||
actions = f.read().strip().split(',')
|
||||
return actions
|
||||
except FileNotFoundError:
|
||||
return []
|
||||
|
||||
def get_irqs_for_action(action: str) -> list[str]:
|
||||
ret = []
|
||||
with open("/proc/interrupts") as f:
|
||||
for l in f.readlines():
|
||||
irq = l.split(':')[0].strip()
|
||||
if irq.isdigit() and action in get_irq_action(irq):
|
||||
ret.append(irq)
|
||||
return ret
|
||||
@@ -0,0 +1,8 @@
|
||||
from openpilot.common.params import Params
|
||||
|
||||
|
||||
def get_gps_location_service(params: Params) -> str:
|
||||
if params.get_bool("UbloxAvailable"):
|
||||
return "gpsLocationExternal"
|
||||
else:
|
||||
return "gpsLocation"
|
||||
@@ -0,0 +1,19 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <mutex>
|
||||
|
||||
#include <sys/types.h>
|
||||
|
||||
class I2CBus {
|
||||
private:
|
||||
int i2c_fd;
|
||||
std::mutex m;
|
||||
|
||||
public:
|
||||
I2CBus(uint8_t bus_id);
|
||||
~I2CBus();
|
||||
|
||||
int read_register(uint8_t device_address, uint register_address, uint8_t *buffer, uint8_t len);
|
||||
int set_register(uint8_t device_address, uint register_address, uint8_t data);
|
||||
};
|
||||
@@ -0,0 +1,250 @@
|
||||
import io
|
||||
import os
|
||||
import sys
|
||||
import copy
|
||||
import json
|
||||
import time
|
||||
import uuid
|
||||
import socket
|
||||
import logging
|
||||
import traceback
|
||||
import numpy as np
|
||||
from threading import local
|
||||
from collections import OrderedDict
|
||||
from contextlib import contextmanager
|
||||
|
||||
LOG_TIMESTAMPS = "LOG_TIMESTAMPS" in os.environ
|
||||
|
||||
def json_handler(obj):
|
||||
if isinstance(obj, np.bool_):
|
||||
return bool(obj)
|
||||
# if isinstance(obj, (datetime.date, datetime.time)):
|
||||
# return obj.isoformat()
|
||||
return repr(obj)
|
||||
|
||||
def json_robust_dumps(obj):
|
||||
return json.dumps(obj, default=json_handler)
|
||||
|
||||
class NiceOrderedDict(OrderedDict):
|
||||
def __str__(self):
|
||||
return json_robust_dumps(self)
|
||||
|
||||
class SwagFormatter(logging.Formatter):
|
||||
def __init__(self, swaglogger):
|
||||
logging.Formatter.__init__(self, None, '%a %b %d %H:%M:%S %Z %Y')
|
||||
|
||||
self.swaglogger = swaglogger
|
||||
self.host = socket.gethostname()
|
||||
|
||||
def format_dict(self, record):
|
||||
record_dict = NiceOrderedDict()
|
||||
|
||||
if isinstance(record.msg, dict):
|
||||
record_dict['msg'] = record.msg
|
||||
else:
|
||||
try:
|
||||
record_dict['msg'] = record.getMessage()
|
||||
except (ValueError, TypeError):
|
||||
record_dict['msg'] = [record.msg]+record.args
|
||||
|
||||
record_dict['ctx'] = self.swaglogger.get_ctx()
|
||||
|
||||
if record.exc_info:
|
||||
record_dict['exc_info'] = self.formatException(record.exc_info)
|
||||
|
||||
record_dict['level'] = record.levelname
|
||||
record_dict['levelnum'] = record.levelno
|
||||
record_dict['name'] = record.name
|
||||
record_dict['filename'] = record.filename
|
||||
record_dict['lineno'] = record.lineno
|
||||
record_dict['pathname'] = record.pathname
|
||||
record_dict['module'] = record.module
|
||||
record_dict['funcName'] = record.funcName
|
||||
record_dict['host'] = self.host
|
||||
record_dict['process'] = record.process
|
||||
record_dict['thread'] = record.thread
|
||||
record_dict['threadName'] = record.threadName
|
||||
record_dict['created'] = record.created
|
||||
|
||||
return record_dict
|
||||
|
||||
def format(self, record):
|
||||
if self.swaglogger is None:
|
||||
raise Exception("must set swaglogger before calling format()")
|
||||
return json_robust_dumps(self.format_dict(record))
|
||||
|
||||
class SwagLogFileFormatter(SwagFormatter):
|
||||
def fix_kv(self, k, v):
|
||||
# append type to names to preserve legacy naming in logs
|
||||
# avoids overlapping key namespaces with different types
|
||||
# e.g. log.info() creates 'msg' -> 'msg$s'
|
||||
# log.event() creates 'msg.health.logMonoTime' -> 'msg.health.logMonoTime$i'
|
||||
# because overlapping namespace 'msg' caused problems
|
||||
if isinstance(v, (str, bytes)):
|
||||
k += "$s"
|
||||
elif isinstance(v, float):
|
||||
k += "$f"
|
||||
elif isinstance(v, bool):
|
||||
k += "$b"
|
||||
elif isinstance(v, int):
|
||||
k += "$i"
|
||||
elif isinstance(v, dict):
|
||||
nv = {}
|
||||
for ik, iv in v.items():
|
||||
ik, iv = self.fix_kv(ik, iv)
|
||||
nv[ik] = iv
|
||||
v = nv
|
||||
elif isinstance(v, list):
|
||||
k += "$a"
|
||||
return k, v
|
||||
|
||||
def format(self, record):
|
||||
if isinstance(record, str):
|
||||
v = json.loads(record)
|
||||
else:
|
||||
v = self.format_dict(record)
|
||||
|
||||
mk, mv = self.fix_kv('msg', v['msg'])
|
||||
del v['msg']
|
||||
v[mk] = mv
|
||||
v['id'] = uuid.uuid4().hex
|
||||
|
||||
return json_robust_dumps(v)
|
||||
|
||||
class SwagErrorFilter(logging.Filter):
|
||||
def filter(self, record):
|
||||
return record.levelno < logging.ERROR
|
||||
|
||||
def _tmpfunc():
|
||||
return 0
|
||||
|
||||
def _srcfile():
|
||||
return os.path.normcase(_tmpfunc.__code__.co_filename)
|
||||
|
||||
class SwagLogger(logging.Logger):
|
||||
def __init__(self):
|
||||
logging.Logger.__init__(self, "swaglog")
|
||||
|
||||
self.global_ctx = {}
|
||||
|
||||
self.log_local = local()
|
||||
self.log_local.ctx = {}
|
||||
|
||||
def local_ctx(self):
|
||||
try:
|
||||
return self.log_local.ctx
|
||||
except AttributeError:
|
||||
self.log_local.ctx = {}
|
||||
return self.log_local.ctx
|
||||
|
||||
def get_ctx(self):
|
||||
return dict(self.local_ctx(), **self.global_ctx)
|
||||
|
||||
@contextmanager
|
||||
def ctx(self, **kwargs):
|
||||
old_ctx = self.local_ctx()
|
||||
self.log_local.ctx = copy.copy(old_ctx) or {}
|
||||
self.log_local.ctx.update(kwargs)
|
||||
try:
|
||||
yield
|
||||
finally:
|
||||
self.log_local.ctx = old_ctx
|
||||
|
||||
def bind(self, **kwargs):
|
||||
self.local_ctx().update(kwargs)
|
||||
|
||||
def bind_global(self, **kwargs):
|
||||
self.global_ctx.update(kwargs)
|
||||
|
||||
def event(self, event, *args, **kwargs):
|
||||
evt = NiceOrderedDict()
|
||||
evt['event'] = event
|
||||
if args:
|
||||
evt['args'] = args
|
||||
evt.update(kwargs)
|
||||
if 'error' in kwargs:
|
||||
self.error(evt)
|
||||
elif 'debug' in kwargs:
|
||||
self.debug(evt)
|
||||
else:
|
||||
self.info(evt)
|
||||
|
||||
def timestamp(self, event_name):
|
||||
if LOG_TIMESTAMPS:
|
||||
t = time.monotonic()
|
||||
tstp = NiceOrderedDict()
|
||||
tstp['timestamp'] = NiceOrderedDict()
|
||||
tstp['timestamp']["event"] = event_name
|
||||
tstp['timestamp']["time"] = t*1e9
|
||||
self.debug(tstp)
|
||||
|
||||
def findCaller(self, stack_info=False, stacklevel=1):
|
||||
"""
|
||||
Find the stack frame of the caller so that we can note the source
|
||||
file name, line number and function name.
|
||||
"""
|
||||
f = sys._getframe(3)
|
||||
#On some versions of IronPython, currentframe() returns None if
|
||||
#IronPython isn't run with -X:Frames.
|
||||
if f is not None:
|
||||
f = f.f_back
|
||||
orig_f = f
|
||||
while f and stacklevel > 1:
|
||||
f = f.f_back
|
||||
stacklevel -= 1
|
||||
if not f:
|
||||
f = orig_f
|
||||
rv = "(unknown file)", 0, "(unknown function)", None
|
||||
while hasattr(f, "f_code"):
|
||||
co = f.f_code
|
||||
filename = os.path.normcase(co.co_filename)
|
||||
|
||||
# TODO: is this pylint exception correct?
|
||||
if filename == _srcfile:
|
||||
f = f.f_back
|
||||
continue
|
||||
sinfo = None
|
||||
if stack_info:
|
||||
sio = io.StringIO()
|
||||
sio.write('Stack (most recent call last):\n')
|
||||
traceback.print_stack(f, file=sio)
|
||||
sinfo = sio.getvalue()
|
||||
if sinfo[-1] == '\n':
|
||||
sinfo = sinfo[:-1]
|
||||
sio.close()
|
||||
rv = (co.co_filename, f.f_lineno, co.co_name, sinfo)
|
||||
break
|
||||
return rv
|
||||
|
||||
if __name__ == "__main__":
|
||||
log = SwagLogger()
|
||||
|
||||
stdout_handler = logging.StreamHandler(sys.stdout)
|
||||
stdout_handler.setLevel(logging.INFO)
|
||||
stdout_handler.addFilter(SwagErrorFilter())
|
||||
log.addHandler(stdout_handler)
|
||||
|
||||
stderr_handler = logging.StreamHandler(sys.stderr)
|
||||
stderr_handler.setLevel(logging.ERROR)
|
||||
log.addHandler(stderr_handler)
|
||||
|
||||
log.info("asdasd %s", "a")
|
||||
log.info({'wut': 1})
|
||||
log.warning("warning")
|
||||
log.error("error")
|
||||
log.critical("critical")
|
||||
log.event("test", x="y")
|
||||
|
||||
with log.ctx():
|
||||
stdout_handler.setFormatter(SwagFormatter(log))
|
||||
stderr_handler.setFormatter(SwagFormatter(log))
|
||||
log.bind(user="some user")
|
||||
log.info("in req")
|
||||
print("")
|
||||
log.warning("warning")
|
||||
print("")
|
||||
log.error("error")
|
||||
print("")
|
||||
log.critical("critical")
|
||||
print("")
|
||||
log.event("do_req", a=1, b="c")
|
||||
@@ -0,0 +1,45 @@
|
||||
HTML_REPLACEMENTS = [
|
||||
(r'&', r'&'),
|
||||
(r'"', r'"'),
|
||||
]
|
||||
|
||||
def parse_markdown(text: str, tab_length: int = 2) -> str:
|
||||
lines = text.split("\n")
|
||||
output: list[str] = []
|
||||
list_level = 0
|
||||
|
||||
def end_outstanding_lists(level: int, end_level: int) -> int:
|
||||
while level > end_level:
|
||||
level -= 1
|
||||
output.append("</ul>")
|
||||
if level > 0:
|
||||
output.append("</li>")
|
||||
return end_level
|
||||
|
||||
for i, line in enumerate(lines):
|
||||
if i + 1 < len(lines) and lines[i + 1].startswith("==="): # heading
|
||||
output.append(f"<h1>{line}</h1>")
|
||||
elif line.startswith("==="):
|
||||
pass
|
||||
elif line.lstrip().startswith("* "): # list
|
||||
line_level = 1 + line.count(" " * tab_length, 0, line.index("*"))
|
||||
if list_level >= line_level:
|
||||
list_level = end_outstanding_lists(list_level, line_level)
|
||||
else:
|
||||
list_level += 1
|
||||
if list_level > 1:
|
||||
output[-1] = output[-1].replace("</li>", "")
|
||||
output.append("<ul>")
|
||||
output.append(f"<li>{line.replace('*', '', 1).lstrip()}</li>")
|
||||
else:
|
||||
list_level = end_outstanding_lists(list_level, 0)
|
||||
if len(line) > 0:
|
||||
output.append(line)
|
||||
|
||||
end_outstanding_lists(list_level, 0)
|
||||
output_str = "\n".join(output) + "\n"
|
||||
|
||||
for (fr, to) in HTML_REPLACEMENTS:
|
||||
output_str = output_str.replace(fr, to)
|
||||
|
||||
return output_str
|
||||
@@ -0,0 +1,85 @@
|
||||
#pragma once
|
||||
|
||||
typedef struct vec3 {
|
||||
float v[3];
|
||||
} vec3;
|
||||
|
||||
typedef struct vec4 {
|
||||
float v[4];
|
||||
} vec4;
|
||||
|
||||
typedef struct mat3 {
|
||||
float v[3*3];
|
||||
} mat3;
|
||||
|
||||
typedef struct mat4 {
|
||||
float v[4*4];
|
||||
} mat4;
|
||||
|
||||
static inline mat3 matmul3(const mat3 &a, const mat3 &b) {
|
||||
mat3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<3; k++) {
|
||||
v += a.v[r*3+k] * b.v[k*3+c];
|
||||
}
|
||||
ret.v[r*3+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec3 matvecmul3(const mat3 &a, const vec3 &b) {
|
||||
vec3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
ret.v[r] += a.v[r*3+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline mat4 matmul(const mat4 &a, const mat4 &b) {
|
||||
mat4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<4; k++) {
|
||||
v += a.v[r*4+k] * b.v[k*4+c];
|
||||
}
|
||||
ret.v[r*4+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec4 matvecmul(const mat4 &a, const vec4 &b) {
|
||||
vec4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
ret.v[r] += a.v[r*4+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
// scales the input and output space of a transformation matrix
|
||||
// that assumes pixel-center origin.
|
||||
static inline mat3 transform_scale_buffer(const mat3 &in, float s) {
|
||||
// in_pt = ( transform(out_pt/s + 0.5) - 0.5) * s
|
||||
|
||||
mat3 transform_out = {{
|
||||
1.0f/s, 0.0f, 0.5f,
|
||||
0.0f, 1.0f/s, 0.5f,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
mat3 transform_in = {{
|
||||
s, 0.0f, -0.5f*s,
|
||||
0.0f, s, -0.5f*s,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
return matmul3(transform_in, matmul3(in, transform_out));
|
||||
}
|
||||
@@ -0,0 +1,50 @@
|
||||
"""
|
||||
Utilities for generating mock messages for testing.
|
||||
example in common/tests/test_mock.py
|
||||
"""
|
||||
|
||||
|
||||
import functools
|
||||
import threading
|
||||
from cereal.messaging import PubMaster
|
||||
from cereal.services import SERVICE_LIST
|
||||
from openpilot.common.mock.generators import generate_livePose
|
||||
from openpilot.common.realtime import Ratekeeper
|
||||
|
||||
|
||||
MOCK_GENERATOR = {
|
||||
"livePose": generate_livePose
|
||||
}
|
||||
|
||||
|
||||
def generate_messages_loop(services: list[str], done: threading.Event):
|
||||
pm = PubMaster(services)
|
||||
rk = Ratekeeper(100)
|
||||
i = 0
|
||||
while not done.is_set():
|
||||
for s in services:
|
||||
should_send = i % (100/SERVICE_LIST[s].frequency) == 0
|
||||
if should_send:
|
||||
message = MOCK_GENERATOR[s]()
|
||||
pm.send(s, message)
|
||||
i += 1
|
||||
rk.keep_time()
|
||||
|
||||
|
||||
def mock_messages(services: list[str] | str):
|
||||
if isinstance(services, str):
|
||||
services = [services]
|
||||
|
||||
def decorator(func):
|
||||
@functools.wraps(func)
|
||||
def wrapper(*args, **kwargs):
|
||||
done = threading.Event()
|
||||
t = threading.Thread(target=generate_messages_loop, args=(services, done))
|
||||
t.start()
|
||||
try:
|
||||
return func(*args, **kwargs)
|
||||
finally:
|
||||
done.set()
|
||||
t.join()
|
||||
return wrapper
|
||||
return decorator
|
||||
@@ -0,0 +1,14 @@
|
||||
from cereal import messaging
|
||||
|
||||
|
||||
def generate_livePose():
|
||||
msg = messaging.new_message('livePose')
|
||||
meas = {'x': 0.0, 'y': 0.0, 'z': 0.0, 'xStd': 0.0, 'yStd': 0.0, 'zStd': 0.0, 'valid': True}
|
||||
msg.livePose.orientationNED = meas
|
||||
msg.livePose.velocityDevice = meas
|
||||
msg.livePose.angularVelocityDevice = meas
|
||||
msg.livePose.accelerationDevice = meas
|
||||
msg.livePose.inputsOK = True
|
||||
msg.livePose.posenetOK = True
|
||||
msg.livePose.sensorsOK = True
|
||||
return msg
|
||||
@@ -0,0 +1 @@
|
||||
#define DEFAULT_MODEL "Filet o Fish (Default)"
|
||||
@@ -0,0 +1,71 @@
|
||||
#pragma once
|
||||
|
||||
#include <future>
|
||||
#include <map>
|
||||
#include <string>
|
||||
#include <tuple>
|
||||
#include <utility>
|
||||
#include <vector>
|
||||
|
||||
#include "common/queue.h"
|
||||
|
||||
enum ParamKeyType {
|
||||
PERSISTENT = 0x02,
|
||||
CLEAR_ON_MANAGER_START = 0x04,
|
||||
CLEAR_ON_ONROAD_TRANSITION = 0x08,
|
||||
CLEAR_ON_OFFROAD_TRANSITION = 0x10,
|
||||
DONT_LOG = 0x20,
|
||||
DEVELOPMENT_ONLY = 0x40,
|
||||
BACKUP = 0x80,
|
||||
ALL = 0xFFFFFFFF
|
||||
};
|
||||
|
||||
class Params {
|
||||
public:
|
||||
explicit Params(const std::string &path = {});
|
||||
~Params();
|
||||
// Not copyable.
|
||||
Params(const Params&) = delete;
|
||||
Params& operator=(const Params&) = delete;
|
||||
|
||||
std::vector<std::string> allKeys() const;
|
||||
bool checkKey(const std::string &key);
|
||||
ParamKeyType getKeyType(const std::string &key);
|
||||
inline std::string getParamPath(const std::string &key = {}) {
|
||||
return params_path + params_prefix + (key.empty() ? "" : "/" + key);
|
||||
}
|
||||
|
||||
// Delete a value
|
||||
int remove(const std::string &key);
|
||||
void clearAll(ParamKeyType type);
|
||||
|
||||
// helpers for reading values
|
||||
std::string get(const std::string &key, bool block = false);
|
||||
inline bool getBool(const std::string &key, bool block = false) {
|
||||
return get(key, block) == "1";
|
||||
}
|
||||
std::map<std::string, std::string> readAll();
|
||||
|
||||
// helpers for writing values
|
||||
int put(const char *key, const char *val, size_t value_size);
|
||||
inline int put(const std::string &key, const std::string &val) {
|
||||
return put(key.c_str(), val.data(), val.size());
|
||||
}
|
||||
inline int putBool(const std::string &key, bool val) {
|
||||
return put(key.c_str(), val ? "1" : "0", 1);
|
||||
}
|
||||
void putNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putBoolNonBlocking(const std::string &key, bool val) {
|
||||
putNonBlocking(key, val ? "1" : "0");
|
||||
}
|
||||
|
||||
private:
|
||||
void asyncWriteThread();
|
||||
|
||||
std::string params_path;
|
||||
std::string params_prefix;
|
||||
|
||||
// for nonblocking write
|
||||
std::future<void> future;
|
||||
SafeQueue<std::pair<std::string, std::string>> queue;
|
||||
};
|
||||
@@ -0,0 +1,18 @@
|
||||
from openpilot.common.params_pyx import Params, ParamKeyType, UnknownKeyName
|
||||
assert Params
|
||||
assert ParamKeyType
|
||||
assert UnknownKeyName
|
||||
|
||||
if __name__ == "__main__":
|
||||
import sys
|
||||
|
||||
params = Params()
|
||||
key = sys.argv[1]
|
||||
assert params.check_key(key), f"unknown param: {key}"
|
||||
|
||||
if len(sys.argv) == 3:
|
||||
val = sys.argv[2]
|
||||
print(f"SET: {key} = {val}")
|
||||
params.put(key, val)
|
||||
elif len(sys.argv) == 2:
|
||||
print(f"GET: {key} = {params.get(key)}")
|
||||
@@ -0,0 +1,164 @@
|
||||
#pragma once
|
||||
|
||||
#include <string>
|
||||
#include <unordered_map>
|
||||
|
||||
inline static std::unordered_map<std::string, uint32_t> keys = {
|
||||
{"AccessToken", CLEAR_ON_MANAGER_START | DONT_LOG},
|
||||
{"AdbEnabled", PERSISTENT},
|
||||
{"AlwaysOnDM", PERSISTENT},
|
||||
{"ApiCache_Device", PERSISTENT},
|
||||
{"ApiCache_FirehoseStats", PERSISTENT},
|
||||
{"AssistNowToken", PERSISTENT},
|
||||
{"AthenadPid", PERSISTENT},
|
||||
{"AthenadUploadQueue", PERSISTENT},
|
||||
{"AthenadRecentlyViewedRoutes", PERSISTENT},
|
||||
{"BootCount", PERSISTENT},
|
||||
{"CalibrationParams", PERSISTENT},
|
||||
{"CameraDebugExpGain", CLEAR_ON_MANAGER_START},
|
||||
{"CameraDebugExpTime", CLEAR_ON_MANAGER_START},
|
||||
{"CarBatteryCapacity", PERSISTENT},
|
||||
{"CarParams", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CarParamsCache", CLEAR_ON_MANAGER_START},
|
||||
{"CarParamsPersistent", PERSISTENT},
|
||||
{"CarParamsPrevRoute", PERSISTENT},
|
||||
{"CompletedTrainingVersion", PERSISTENT},
|
||||
{"ControlsReady", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CurrentBootlog", PERSISTENT},
|
||||
{"CurrentRoute", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"DisableLogging", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"DisablePowerDown", PERSISTENT | BACKUP},
|
||||
{"DisableUpdates", PERSISTENT | BACKUP},
|
||||
{"DisengageOnAccelerator", PERSISTENT | BACKUP},
|
||||
{"DongleId", PERSISTENT},
|
||||
{"DoReboot", CLEAR_ON_MANAGER_START},
|
||||
{"DoShutdown", CLEAR_ON_MANAGER_START},
|
||||
{"DoUninstall", CLEAR_ON_MANAGER_START},
|
||||
{"ExperimentalLongitudinalEnabled", PERSISTENT | DEVELOPMENT_ONLY | BACKUP},
|
||||
{"ExperimentalMode", PERSISTENT | BACKUP},
|
||||
{"ExperimentalModeConfirmed", PERSISTENT | BACKUP},
|
||||
{"FirmwareQueryDone", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"ForcePowerDown", PERSISTENT},
|
||||
{"GitBranch", PERSISTENT},
|
||||
{"GitCommit", PERSISTENT},
|
||||
{"GitCommitDate", PERSISTENT},
|
||||
{"GitDiff", PERSISTENT},
|
||||
{"GithubSshKeys", PERSISTENT | BACKUP},
|
||||
{"GithubUsername", PERSISTENT | BACKUP},
|
||||
{"GitRemote", PERSISTENT},
|
||||
{"GsmApn", PERSISTENT | BACKUP},
|
||||
{"GsmMetered", PERSISTENT | BACKUP},
|
||||
{"GsmRoaming", PERSISTENT | BACKUP},
|
||||
{"HardwareSerial", PERSISTENT},
|
||||
{"HasAcceptedTerms", PERSISTENT},
|
||||
{"InstallDate", PERSISTENT},
|
||||
{"IsDriverViewEnabled", CLEAR_ON_MANAGER_START},
|
||||
{"IsEngaged", PERSISTENT},
|
||||
{"IsLdwEnabled", PERSISTENT | BACKUP},
|
||||
{"IsMetric", PERSISTENT | BACKUP},
|
||||
{"IsOffroad", CLEAR_ON_MANAGER_START},
|
||||
{"IsOnroad", PERSISTENT},
|
||||
{"IsRhdDetected", PERSISTENT},
|
||||
{"IsReleaseBranch", CLEAR_ON_MANAGER_START},
|
||||
{"IsTakingSnapshot", CLEAR_ON_MANAGER_START},
|
||||
{"IsTestedBranch", CLEAR_ON_MANAGER_START},
|
||||
{"JoystickDebugMode", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"LanguageSetting", PERSISTENT | BACKUP},
|
||||
{"LastAthenaPingTime", CLEAR_ON_MANAGER_START},
|
||||
{"LastGPSPosition", PERSISTENT},
|
||||
{"LastManagerExitReason", CLEAR_ON_MANAGER_START},
|
||||
{"LastOffroadStatusPacket", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"LastPowerDropDetected", CLEAR_ON_MANAGER_START},
|
||||
{"LastUpdateException", CLEAR_ON_MANAGER_START},
|
||||
{"LastUpdateTime", PERSISTENT},
|
||||
{"LiveParameters", PERSISTENT},
|
||||
{"LiveTorqueParameters", PERSISTENT | DONT_LOG},
|
||||
{"LocationFilterInitialState", PERSISTENT},
|
||||
{"LongitudinalManeuverMode", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"LongitudinalPersonality", PERSISTENT | BACKUP},
|
||||
{"NetworkMetered", PERSISTENT},
|
||||
{"ObdMultiplexingChanged", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"ObdMultiplexingEnabled", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_BadNvme", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_CarUnrecognized", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_ConnectivityNeeded", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_ConnectivityNeededPrompt", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_IsTakingSnapshot", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_NeosUpdate", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_NoFirmware", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_Recalibration", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_StorageMissing", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_TemperatureTooHigh", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_UnofficialHardware", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_UpdateFailed", CLEAR_ON_MANAGER_START},
|
||||
{"OpenpilotEnabledToggle", PERSISTENT | BACKUP},
|
||||
{"PandaHeartbeatLost", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"PandaSomResetTriggered", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"PandaSignatures", CLEAR_ON_MANAGER_START},
|
||||
{"PrimeType", PERSISTENT},
|
||||
{"RecordFront", PERSISTENT | BACKUP},
|
||||
{"RecordFrontLock", PERSISTENT}, // for the internal fleet
|
||||
{"SecOCKey", PERSISTENT | DONT_LOG}, // Candidate for | BACKUP
|
||||
{"RouteCount", PERSISTENT},
|
||||
{"SnoozeUpdate", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"SshEnabled", PERSISTENT | BACKUP},
|
||||
{"TermsVersion", PERSISTENT},
|
||||
{"TrainingVersion", PERSISTENT},
|
||||
{"UbloxAvailable", PERSISTENT},
|
||||
{"UpdateAvailable", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"UpdateFailedCount", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterAvailableBranches", PERSISTENT},
|
||||
{"UpdaterCurrentDescription", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterCurrentReleaseNotes", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterFetchAvailable", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterNewDescription", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterNewReleaseNotes", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterState", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterTargetBranch", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterLastFetchTime", PERSISTENT},
|
||||
{"Version", PERSISTENT},
|
||||
|
||||
// --- sunnypilot params --- //
|
||||
{"ApiCache_DriveStats", PERSISTENT},
|
||||
{"CarParamsSP", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CarParamsSPCache", CLEAR_ON_MANAGER_START},
|
||||
{"CarParamsSPPersistent", PERSISTENT},
|
||||
{"CarPlatformBundle", PERSISTENT},
|
||||
{"EnableGithubRunner", PERSISTENT | BACKUP},
|
||||
{"LateralTorqueControlLateralJerk", PERSISTENT | BACKUP},
|
||||
{"ModelRunnerTypeCache", CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"OffroadMode", CLEAR_ON_MANAGER_START},
|
||||
{"OffroadMode_Status", CLEAR_ON_MANAGER_START},
|
||||
|
||||
// MADS params
|
||||
{"Mads", PERSISTENT | BACKUP},
|
||||
{"MadsMainCruiseAllowed", PERSISTENT | BACKUP},
|
||||
{"MadsPauseLateralOnBrake", PERSISTENT | BACKUP},
|
||||
{"MadsUnifiedEngagementMode", PERSISTENT | BACKUP},
|
||||
|
||||
// Model Manager params
|
||||
{"ModelManager_ActiveBundle", PERSISTENT},
|
||||
{"ModelManager_DownloadIndex", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"ModelManager_LastSyncTime", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"ModelManager_ModelsCache", PERSISTENT | BACKUP},
|
||||
|
||||
// Neural Network Lateral Control
|
||||
{"NeuralNetworkLateralControl", PERSISTENT | BACKUP},
|
||||
|
||||
// sunnylink params
|
||||
{"EnableSunnylinkUploader", PERSISTENT | BACKUP},
|
||||
{"LastSunnylinkPingTime", CLEAR_ON_MANAGER_START},
|
||||
{"SunnylinkCache_Roles", PERSISTENT},
|
||||
{"SunnylinkCache_Users", PERSISTENT},
|
||||
{"SunnylinkDongleId", PERSISTENT},
|
||||
{"SunnylinkdPid", PERSISTENT},
|
||||
{"SunnylinkEnabled", PERSISTENT},
|
||||
|
||||
// sunnypilot car specific params
|
||||
{"HyundaiRadarTracks", PERSISTENT},
|
||||
{"HyundaiRadarTracksConfirmed", PERSISTENT},
|
||||
{"HyundaiRadarTracksPersistent", PERSISTENT},
|
||||
{"HyundaiRadarTracksToggle", PERSISTENT},
|
||||
|
||||
{"DynamicExperimentalControl", PERSISTENT},
|
||||
};
|
||||
+17914
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,123 @@
|
||||
# distutils: language = c++
|
||||
# cython: language_level = 3
|
||||
from libcpp cimport bool
|
||||
from libcpp.string cimport string
|
||||
from libcpp.vector cimport vector
|
||||
|
||||
cdef extern from "common/params.h":
|
||||
cpdef enum ParamKeyType:
|
||||
PERSISTENT
|
||||
CLEAR_ON_MANAGER_START
|
||||
CLEAR_ON_ONROAD_TRANSITION
|
||||
CLEAR_ON_OFFROAD_TRANSITION
|
||||
DEVELOPMENT_ONLY
|
||||
ALL
|
||||
|
||||
cdef cppclass c_Params "Params":
|
||||
c_Params(string) except + nogil
|
||||
string get(string, bool) nogil
|
||||
bool getBool(string, bool) nogil
|
||||
int remove(string) nogil
|
||||
int put(string, string) nogil
|
||||
void putNonBlocking(string, string) nogil
|
||||
void putBoolNonBlocking(string, bool) nogil
|
||||
int putBool(string, bool) nogil
|
||||
bool checkKey(string) nogil
|
||||
string getParamPath(string) nogil
|
||||
void clearAll(ParamKeyType)
|
||||
vector[string] allKeys()
|
||||
|
||||
|
||||
def ensure_bytes(v):
|
||||
return v.encode() if isinstance(v, str) else v
|
||||
|
||||
class UnknownKeyName(Exception):
|
||||
pass
|
||||
|
||||
cdef class Params:
|
||||
cdef c_Params* p
|
||||
cdef str d
|
||||
|
||||
def __cinit__(self, d=""):
|
||||
cdef string path = <string>d.encode()
|
||||
with nogil:
|
||||
self.p = new c_Params(path)
|
||||
self.d = d
|
||||
|
||||
def __reduce__(self):
|
||||
return (type(self), (self.d,))
|
||||
|
||||
def __dealloc__(self):
|
||||
del self.p
|
||||
|
||||
def clear_all(self, tx_type=ParamKeyType.ALL):
|
||||
self.p.clearAll(tx_type)
|
||||
|
||||
def check_key(self, key):
|
||||
key = ensure_bytes(key)
|
||||
if not self.p.checkKey(key):
|
||||
raise UnknownKeyName(key)
|
||||
return key
|
||||
|
||||
def get(self, key, bool block=False, encoding=None):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string val
|
||||
with nogil:
|
||||
val = self.p.get(k, block)
|
||||
|
||||
if val == b"":
|
||||
if block:
|
||||
# If we got no value while running in blocked mode
|
||||
# it means we got an interrupt while waiting
|
||||
raise KeyboardInterrupt
|
||||
else:
|
||||
return None
|
||||
|
||||
return val if encoding is None else val.decode(encoding)
|
||||
|
||||
def get_bool(self, key, bool block=False):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef bool r
|
||||
with nogil:
|
||||
r = self.p.getBool(k, block)
|
||||
return r
|
||||
|
||||
def put(self, key, dat):
|
||||
"""
|
||||
Warning: This function blocks until the param is written to disk!
|
||||
In very rare cases this can take over a second, and your code will hang.
|
||||
Use the put_nonblocking, put_bool_nonblocking in time sensitive code, but
|
||||
in general try to avoid writing params as much as possible.
|
||||
"""
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = ensure_bytes(dat)
|
||||
with nogil:
|
||||
self.p.put(k, dat_bytes)
|
||||
|
||||
def put_bool(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBool(k, val)
|
||||
|
||||
def put_nonblocking(self, key, dat):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = ensure_bytes(dat)
|
||||
with nogil:
|
||||
self.p.putNonBlocking(k, dat_bytes)
|
||||
|
||||
def put_bool_nonblocking(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBoolNonBlocking(k, val)
|
||||
|
||||
def remove(self, key):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.remove(k)
|
||||
|
||||
def get_param_path(self, key=""):
|
||||
cdef string key_bytes = ensure_bytes(key)
|
||||
return self.p.getParamPath(key_bytes).decode("utf-8")
|
||||
|
||||
def all_keys(self):
|
||||
return self.p.allKeys()
|
||||
Executable
BIN
Binary file not shown.
@@ -0,0 +1,70 @@
|
||||
import numpy as np
|
||||
from numbers import Number
|
||||
|
||||
class PIDController:
|
||||
def __init__(self, k_p, k_i, k_f=0., k_d=0., pos_limit=1e308, neg_limit=-1e308, rate=100):
|
||||
self._k_p = k_p
|
||||
self._k_i = k_i
|
||||
self._k_d = k_d
|
||||
self.k_f = k_f # feedforward gain
|
||||
if isinstance(self._k_p, Number):
|
||||
self._k_p = [[0], [self._k_p]]
|
||||
if isinstance(self._k_i, Number):
|
||||
self._k_i = [[0], [self._k_i]]
|
||||
if isinstance(self._k_d, Number):
|
||||
self._k_d = [[0], [self._k_d]]
|
||||
|
||||
self.pos_limit = pos_limit
|
||||
self.neg_limit = neg_limit
|
||||
|
||||
self.i_unwind_rate = 0.3 / rate
|
||||
self.i_rate = 1.0 / rate
|
||||
self.speed = 0.0
|
||||
|
||||
self.reset()
|
||||
|
||||
@property
|
||||
def k_p(self):
|
||||
return np.interp(self.speed, self._k_p[0], self._k_p[1])
|
||||
|
||||
@property
|
||||
def k_i(self):
|
||||
return np.interp(self.speed, self._k_i[0], self._k_i[1])
|
||||
|
||||
@property
|
||||
def k_d(self):
|
||||
return np.interp(self.speed, self._k_d[0], self._k_d[1])
|
||||
|
||||
@property
|
||||
def error_integral(self):
|
||||
return self.i/self.k_i
|
||||
|
||||
def reset(self):
|
||||
self.p = 0.0
|
||||
self.i = 0.0
|
||||
self.d = 0.0
|
||||
self.f = 0.0
|
||||
self.control = 0
|
||||
|
||||
def update(self, error, error_rate=0.0, speed=0.0, override=False, feedforward=0., freeze_integrator=False):
|
||||
self.speed = speed
|
||||
|
||||
self.p = float(error) * self.k_p
|
||||
self.f = feedforward * self.k_f
|
||||
self.d = error_rate * self.k_d
|
||||
|
||||
if override:
|
||||
self.i -= self.i_unwind_rate * float(np.sign(self.i))
|
||||
else:
|
||||
if not freeze_integrator:
|
||||
self.i = self.i + error * self.k_i * self.i_rate
|
||||
|
||||
# Clip i to prevent exceeding control limits
|
||||
control_no_i = self.p + self.d + self.f
|
||||
control_no_i = np.clip(control_no_i, self.neg_limit, self.pos_limit)
|
||||
self.i = np.clip(self.i, self.neg_limit - control_no_i, self.pos_limit - control_no_i)
|
||||
|
||||
control = self.p + self.i + self.d + self.f
|
||||
|
||||
self.control = np.clip(control, self.neg_limit, self.pos_limit)
|
||||
return self.control
|
||||
@@ -0,0 +1,39 @@
|
||||
#pragma once
|
||||
|
||||
#include <cassert>
|
||||
#include <string>
|
||||
|
||||
#include "common/params.h"
|
||||
#include "common/util.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
class OpenpilotPrefix {
|
||||
public:
|
||||
OpenpilotPrefix(std::string prefix = {}) {
|
||||
if (prefix.empty()) {
|
||||
prefix = util::random_string(15);
|
||||
}
|
||||
msgq_path = Path::shm_path() + "/" + prefix;
|
||||
bool ret = util::create_directories(msgq_path, 0777);
|
||||
assert(ret);
|
||||
setenv("OPENPILOT_PREFIX", prefix.c_str(), 1);
|
||||
}
|
||||
|
||||
~OpenpilotPrefix() {
|
||||
auto param_path = Params().getParamPath();
|
||||
if (util::file_exists(param_path)) {
|
||||
std::string real_path = util::readlink(param_path);
|
||||
system(util::string_format("rm %s -rf", real_path.c_str()).c_str());
|
||||
unlink(param_path.c_str());
|
||||
}
|
||||
if (getenv("COMMA_CACHE") == nullptr) {
|
||||
system(util::string_format("rm %s -rf", Path::download_cache_root().c_str()).c_str());
|
||||
}
|
||||
system(util::string_format("rm %s -rf", Path::comma_home().c_str()).c_str());
|
||||
system(util::string_format("rm %s -rf", msgq_path.c_str()).c_str());
|
||||
unsetenv("OPENPILOT_PREFIX");
|
||||
}
|
||||
|
||||
private:
|
||||
std::string msgq_path;
|
||||
};
|
||||
@@ -0,0 +1,53 @@
|
||||
import os
|
||||
import shutil
|
||||
import uuid
|
||||
|
||||
|
||||
from openpilot.common.params import Params
|
||||
from openpilot.system.hardware import PC
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
from openpilot.system.hardware.hw import DEFAULT_DOWNLOAD_CACHE_ROOT
|
||||
|
||||
class OpenpilotPrefix:
|
||||
def __init__(self, prefix: str = None, clean_dirs_on_exit: bool = True, shared_download_cache: bool = False):
|
||||
self.prefix = prefix if prefix else str(uuid.uuid4().hex[0:15])
|
||||
self.msgq_path = os.path.join(Paths.shm_path(), self.prefix)
|
||||
self.clean_dirs_on_exit = clean_dirs_on_exit
|
||||
self.shared_download_cache = shared_download_cache
|
||||
|
||||
def __enter__(self):
|
||||
self.original_prefix = os.environ.get('OPENPILOT_PREFIX', None)
|
||||
os.environ['OPENPILOT_PREFIX'] = self.prefix
|
||||
try:
|
||||
os.mkdir(self.msgq_path)
|
||||
except FileExistsError:
|
||||
pass
|
||||
os.makedirs(Paths.log_root(), exist_ok=True)
|
||||
|
||||
if self.shared_download_cache:
|
||||
os.environ["COMMA_CACHE"] = DEFAULT_DOWNLOAD_CACHE_ROOT
|
||||
|
||||
return self
|
||||
|
||||
def __exit__(self, exc_type, exc_obj, exc_tb):
|
||||
if self.clean_dirs_on_exit:
|
||||
self.clean_dirs()
|
||||
try:
|
||||
del os.environ['OPENPILOT_PREFIX']
|
||||
if self.original_prefix is not None:
|
||||
os.environ['OPENPILOT_PREFIX'] = self.original_prefix
|
||||
except KeyError:
|
||||
pass
|
||||
return False
|
||||
|
||||
def clean_dirs(self):
|
||||
symlink_path = Params().get_param_path()
|
||||
if os.path.exists(symlink_path):
|
||||
shutil.rmtree(os.path.realpath(symlink_path), ignore_errors=True)
|
||||
os.remove(symlink_path)
|
||||
shutil.rmtree(self.msgq_path, ignore_errors=True)
|
||||
if PC:
|
||||
shutil.rmtree(Paths.log_root(), ignore_errors=True)
|
||||
if not os.environ.get("COMMA_CACHE", False):
|
||||
shutil.rmtree(Paths.download_cache_root(), ignore_errors=True)
|
||||
shutil.rmtree(Paths.comma_home(), ignore_errors=True)
|
||||
@@ -0,0 +1,52 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <mutex>
|
||||
#include <queue>
|
||||
|
||||
template <class T>
|
||||
class SafeQueue {
|
||||
public:
|
||||
SafeQueue() = default;
|
||||
|
||||
void push(const T& v) {
|
||||
{
|
||||
std::unique_lock lk(m);
|
||||
q.push(v);
|
||||
}
|
||||
cv.notify_one();
|
||||
}
|
||||
|
||||
T pop() {
|
||||
std::unique_lock lk(m);
|
||||
cv.wait(lk, [this] { return !q.empty(); });
|
||||
T v = q.front();
|
||||
q.pop();
|
||||
return v;
|
||||
}
|
||||
|
||||
bool try_pop(T& v, int timeout_ms = 0) {
|
||||
std::unique_lock lk(m);
|
||||
if (!cv.wait_for(lk, std::chrono::milliseconds(timeout_ms), [this] { return !q.empty(); })) {
|
||||
return false;
|
||||
}
|
||||
v = q.front();
|
||||
q.pop();
|
||||
return true;
|
||||
}
|
||||
|
||||
bool empty() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.empty();
|
||||
}
|
||||
|
||||
size_t size() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.size();
|
||||
}
|
||||
|
||||
private:
|
||||
mutable std::mutex m;
|
||||
std::condition_variable cv;
|
||||
std::queue<T> q;
|
||||
};
|
||||
@@ -0,0 +1,23 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <string>
|
||||
|
||||
class RateKeeper {
|
||||
public:
|
||||
RateKeeper(const std::string &name, float rate, float print_delay_threshold = 0);
|
||||
~RateKeeper() {}
|
||||
bool keepTime();
|
||||
bool monitorTime();
|
||||
inline uint64_t frame() const { return frame_; }
|
||||
inline double remaining() const { return remaining_; }
|
||||
|
||||
private:
|
||||
double interval;
|
||||
double next_frame_time;
|
||||
double last_monitor_time;
|
||||
double remaining_ = 0;
|
||||
float print_delay_threshold = 0;
|
||||
uint64_t frame_ = 0;
|
||||
std::string name;
|
||||
};
|
||||
@@ -0,0 +1,95 @@
|
||||
"""Utilities for reading real time clocks and keeping soft real time constraints."""
|
||||
import gc
|
||||
import os
|
||||
import time
|
||||
|
||||
from setproctitle import getproctitle
|
||||
|
||||
from openpilot.common.util import MovingAverage
|
||||
from openpilot.system.hardware import PC
|
||||
|
||||
|
||||
# time step for each process
|
||||
DT_CTRL = 0.01 # controlsd
|
||||
DT_MDL = 0.05 # model
|
||||
DT_HW = 0.5 # hardwared and manager
|
||||
DT_DMON = 0.05 # driver monitoring
|
||||
|
||||
|
||||
class Priority:
|
||||
# CORE 2
|
||||
# - modeld = 55
|
||||
# - camerad = 54
|
||||
CTRL_LOW = 51 # plannerd & radard
|
||||
|
||||
# CORE 3
|
||||
# - pandad = 55
|
||||
CTRL_HIGH = 53
|
||||
|
||||
|
||||
def set_core_affinity(cores: list[int]) -> None:
|
||||
if not PC:
|
||||
os.sched_setaffinity(0, cores)
|
||||
|
||||
|
||||
def config_realtime_process(cores: int | list[int], priority: int) -> None:
|
||||
gc.disable()
|
||||
if not PC:
|
||||
os.sched_setscheduler(0, os.SCHED_FIFO, os.sched_param(priority))
|
||||
c = cores if isinstance(cores, list) else [cores, ]
|
||||
set_core_affinity(c)
|
||||
|
||||
|
||||
class Ratekeeper:
|
||||
def __init__(self, rate: float, print_delay_threshold: float | None = 0.0) -> None:
|
||||
"""Rate in Hz for ratekeeping. print_delay_threshold must be nonnegative."""
|
||||
self._interval = 1. / rate
|
||||
self._print_delay_threshold = print_delay_threshold
|
||||
self._frame = 0
|
||||
self._remaining = 0.0
|
||||
self._process_name = getproctitle()
|
||||
self._last_monitor_time = -1.
|
||||
self._next_frame_time = -1.
|
||||
|
||||
self.avg_dt = MovingAverage(100)
|
||||
self.avg_dt.add_value(self._interval)
|
||||
|
||||
@property
|
||||
def frame(self) -> int:
|
||||
return self._frame
|
||||
|
||||
@property
|
||||
def remaining(self) -> float:
|
||||
return self._remaining
|
||||
|
||||
@property
|
||||
def lagging(self) -> bool:
|
||||
expected_dt = self._interval * (1 / 0.9)
|
||||
return self.avg_dt.get_average() > expected_dt
|
||||
|
||||
# Maintain loop rate by calling this at the end of each loop
|
||||
def keep_time(self) -> bool:
|
||||
lagged = self.monitor_time()
|
||||
if self._remaining > 0:
|
||||
time.sleep(self._remaining)
|
||||
return lagged
|
||||
|
||||
# Monitors the cumulative lag, but does not enforce a rate
|
||||
def monitor_time(self) -> bool:
|
||||
if self._last_monitor_time < 0:
|
||||
self._next_frame_time = time.monotonic() + self._interval
|
||||
self._last_monitor_time = time.monotonic()
|
||||
|
||||
prev = self._last_monitor_time
|
||||
self._last_monitor_time = time.monotonic()
|
||||
self.avg_dt.add_value(self._last_monitor_time - prev)
|
||||
|
||||
lagged = False
|
||||
remaining = self._next_frame_time - time.monotonic()
|
||||
self._next_frame_time += self._interval
|
||||
if self._print_delay_threshold is not None and remaining < -self._print_delay_threshold:
|
||||
print(f"{self._process_name} lagging by {-remaining * 1000:.2f} ms")
|
||||
lagged = True
|
||||
self._frame += 1
|
||||
self._remaining = remaining
|
||||
return lagged
|
||||
@@ -0,0 +1,30 @@
|
||||
import time
|
||||
import functools
|
||||
|
||||
from openpilot.common.swaglog import cloudlog
|
||||
|
||||
|
||||
def retry(attempts=3, delay=1.0, ignore_failure=False):
|
||||
def decorator(func):
|
||||
@functools.wraps(func)
|
||||
def wrapper(*args, **kwargs):
|
||||
for _ in range(attempts):
|
||||
try:
|
||||
return func(*args, **kwargs)
|
||||
except Exception:
|
||||
cloudlog.exception(f"{func.__name__} failed, trying again")
|
||||
time.sleep(delay)
|
||||
|
||||
if ignore_failure:
|
||||
cloudlog.error(f"{func.__name__} failed after retry")
|
||||
else:
|
||||
raise Exception(f"{func.__name__} failed after retry")
|
||||
return wrapper
|
||||
return decorator
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
@retry(attempts=10)
|
||||
def abc():
|
||||
raise ValueError("abc failed :(")
|
||||
abc()
|
||||
@@ -0,0 +1,13 @@
|
||||
import subprocess
|
||||
|
||||
|
||||
def run_cmd(cmd: list[str], cwd=None, env=None) -> str:
|
||||
return subprocess.check_output(cmd, encoding='utf8', cwd=cwd, env=env).strip()
|
||||
|
||||
|
||||
def run_cmd_default(cmd: list[str], default: str = "", cwd=None, env=None) -> str:
|
||||
try:
|
||||
return run_cmd(cmd, cwd=cwd, env=env)
|
||||
except subprocess.CalledProcessError:
|
||||
return default
|
||||
|
||||
@@ -0,0 +1,54 @@
|
||||
import numpy as np
|
||||
|
||||
|
||||
def get_kalman_gain(dt, A, C, Q, R, iterations=100):
|
||||
P = np.zeros_like(Q)
|
||||
for _ in range(iterations):
|
||||
P = A.dot(P).dot(A.T) + dt * Q
|
||||
S = C.dot(P).dot(C.T) + R
|
||||
K = P.dot(C.T).dot(np.linalg.inv(S))
|
||||
P = (np.eye(len(P)) - K.dot(C)).dot(P)
|
||||
return K
|
||||
|
||||
|
||||
class KF1D:
|
||||
# this EKF assumes constant covariance matrix, so calculations are much simpler
|
||||
# the Kalman gain also needs to be precomputed using the control module
|
||||
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x0_0 = x0[0][0]
|
||||
self.x1_0 = x0[1][0]
|
||||
self.A0_0 = A[0][0]
|
||||
self.A0_1 = A[0][1]
|
||||
self.A1_0 = A[1][0]
|
||||
self.A1_1 = A[1][1]
|
||||
self.C0_0 = C[0]
|
||||
self.C0_1 = C[1]
|
||||
self.K0_0 = K[0][0]
|
||||
self.K1_0 = K[1][0]
|
||||
|
||||
self.A_K_0 = self.A0_0 - self.K0_0 * self.C0_0
|
||||
self.A_K_1 = self.A0_1 - self.K0_0 * self.C0_1
|
||||
self.A_K_2 = self.A1_0 - self.K1_0 * self.C0_0
|
||||
self.A_K_3 = self.A1_1 - self.K1_0 * self.C0_1
|
||||
|
||||
# K matrix needs to be pre-computed as follow:
|
||||
# import control
|
||||
# (x, l, K) = control.dare(np.transpose(self.A), np.transpose(self.C), Q, R)
|
||||
# self.K = np.transpose(K)
|
||||
|
||||
def update(self, meas):
|
||||
#self.x = np.dot(self.A_K, self.x) + np.dot(self.K, meas)
|
||||
x0_0 = self.A_K_0 * self.x0_0 + self.A_K_1 * self.x1_0 + self.K0_0 * meas
|
||||
x1_0 = self.A_K_2 * self.x0_0 + self.A_K_3 * self.x1_0 + self.K1_0 * meas
|
||||
self.x0_0 = x0_0
|
||||
self.x1_0 = x1_0
|
||||
return [self.x0_0, self.x1_0]
|
||||
|
||||
@property
|
||||
def x(self):
|
||||
return [[self.x0_0], [self.x1_0]]
|
||||
|
||||
def set_x(self, x):
|
||||
self.x0_0 = x[0][0]
|
||||
self.x1_0 = x[1][0]
|
||||
@@ -0,0 +1,52 @@
|
||||
import os
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class Spinner:
|
||||
def __init__(self):
|
||||
try:
|
||||
self.spinner_proc = subprocess.Popen(["./spinner"],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "selfdrive", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.spinner_proc = None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def update(self, spinner_text: str):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.stdin.write(spinner_text.encode('utf8') + b"\n")
|
||||
try:
|
||||
self.spinner_proc.stdin.flush()
|
||||
except BrokenPipeError:
|
||||
pass
|
||||
|
||||
def update_progress(self, cur: float, total: float):
|
||||
self.update(str(round(100 * cur / total)))
|
||||
|
||||
def close(self):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.kill()
|
||||
try:
|
||||
self.spinner_proc.communicate(timeout=2.)
|
||||
except subprocess.TimeoutExpired:
|
||||
print("WARNING: failed to kill spinner")
|
||||
self.spinner_proc = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
import time
|
||||
with Spinner() as s:
|
||||
s.update("Spinner text")
|
||||
time.sleep(5.0)
|
||||
print("gone")
|
||||
time.sleep(5.0)
|
||||
@@ -0,0 +1,73 @@
|
||||
import numpy as np
|
||||
|
||||
class RunningStat:
|
||||
# tracks realtime mean and standard deviation without storing any data
|
||||
def __init__(self, priors=None, max_trackable=-1):
|
||||
self.max_trackable = max_trackable
|
||||
if priors is not None:
|
||||
# initialize from history
|
||||
self.M = priors[0]
|
||||
self.S = priors[1]
|
||||
self.n = priors[2]
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
else:
|
||||
self.reset()
|
||||
|
||||
def reset(self):
|
||||
self.M = 0.
|
||||
self.S = 0.
|
||||
self.M_last = 0.
|
||||
self.S_last = 0.
|
||||
self.n = 0
|
||||
|
||||
def push_data(self, new_data):
|
||||
# short term memory hack
|
||||
if self.max_trackable < 0 or self.n < self.max_trackable:
|
||||
self.n += 1
|
||||
if self.n == 0:
|
||||
self.M_last = new_data
|
||||
self.M = self.M_last
|
||||
self.S_last = 0.
|
||||
else:
|
||||
self.M = self.M_last + (new_data - self.M_last) / self.n
|
||||
self.S = self.S_last + (new_data - self.M_last) * (new_data - self.M)
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
def mean(self):
|
||||
return self.M
|
||||
|
||||
def variance(self):
|
||||
if self.n >= 2:
|
||||
return self.S / (self.n - 1.)
|
||||
else:
|
||||
return 0
|
||||
|
||||
def std(self):
|
||||
return np.sqrt(self.variance())
|
||||
|
||||
def params_to_save(self):
|
||||
return [self.M, self.S, self.n]
|
||||
|
||||
class RunningStatFilter:
|
||||
def __init__(self, raw_priors=None, filtered_priors=None, max_trackable=-1):
|
||||
self.raw_stat = RunningStat(raw_priors, -1)
|
||||
self.filtered_stat = RunningStat(filtered_priors, max_trackable)
|
||||
|
||||
def reset(self):
|
||||
self.raw_stat.reset()
|
||||
self.filtered_stat.reset()
|
||||
|
||||
def push_and_update(self, new_data):
|
||||
_std_last = self.raw_stat.std()
|
||||
self.raw_stat.push_data(new_data)
|
||||
_delta_std = self.raw_stat.std() - _std_last
|
||||
if _delta_std <= 0:
|
||||
self.filtered_stat.push_data(new_data)
|
||||
else:
|
||||
pass
|
||||
# self.filtered_stat.push_data(self.filtered_stat.mean())
|
||||
|
||||
# class SequentialBayesian():
|
||||
@@ -0,0 +1,76 @@
|
||||
#pragma once
|
||||
|
||||
#include "common/timing.h"
|
||||
|
||||
#define CLOUDLOG_DEBUG 10
|
||||
#define CLOUDLOG_INFO 20
|
||||
#define CLOUDLOG_WARNING 30
|
||||
#define CLOUDLOG_ERROR 40
|
||||
#define CLOUDLOG_CRITICAL 50
|
||||
|
||||
|
||||
#ifdef __GNUC__
|
||||
#define SWAG_LOG_CHECK_FMT(a, b) __attribute__ ((format (printf, a, b)))
|
||||
#else
|
||||
#define SWAG_LOG_CHECK_FMT(a, b)
|
||||
#endif
|
||||
|
||||
void cloudlog_e(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, ...) SWAG_LOG_CHECK_FMT(6, 7);
|
||||
|
||||
|
||||
#define cloudlog(lvl, fmt, ...) cloudlog_e(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
fmt, ## __VA_ARGS__)
|
||||
|
||||
#define cloudlog_t(lvl, ...) cloudlog_te(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
__VA_ARGS__)
|
||||
|
||||
|
||||
#define cloudlog_rl(burst, millis, lvl, fmt, ...) \
|
||||
{ \
|
||||
static uint64_t __begin = 0; \
|
||||
static int __printed = 0; \
|
||||
static int __missed = 0; \
|
||||
\
|
||||
int __burst = (burst); \
|
||||
int __millis = (millis); \
|
||||
uint64_t __ts = nanos_since_boot(); \
|
||||
\
|
||||
if (!__begin) { __begin = __ts; } \
|
||||
\
|
||||
if (__begin + __millis*1000000ULL < __ts) { \
|
||||
if (__missed) { \
|
||||
cloudlog(CLOUDLOG_WARNING, "cloudlog: %d messages suppressed", __missed); \
|
||||
} \
|
||||
__begin = 0; \
|
||||
__printed = 0; \
|
||||
__missed = 0; \
|
||||
} \
|
||||
\
|
||||
if (__printed < __burst) { \
|
||||
cloudlog(lvl, fmt, ## __VA_ARGS__); \
|
||||
__printed++; \
|
||||
} else { \
|
||||
__missed++; \
|
||||
} \
|
||||
}
|
||||
|
||||
|
||||
#define LOGT(...) cloudlog_t(CLOUDLOG_DEBUG, __VA_ARGS__)
|
||||
#define LOGD(fmt, ...) cloudlog(CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG(fmt, ...) cloudlog(CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW(fmt, ...) cloudlog(CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE(fmt, ...) cloudlog(CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
|
||||
#define LOGD_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
@@ -0,0 +1,144 @@
|
||||
import logging
|
||||
import os
|
||||
import time
|
||||
import warnings
|
||||
from pathlib import Path
|
||||
from logging.handlers import BaseRotatingHandler
|
||||
|
||||
import zmq
|
||||
|
||||
from openpilot.common.logging_extra import SwagLogger, SwagFormatter, SwagLogFileFormatter
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
|
||||
|
||||
def get_file_handler():
|
||||
Path(Paths.swaglog_root()).mkdir(parents=True, exist_ok=True)
|
||||
base_filename = os.path.join(Paths.swaglog_root(), "swaglog")
|
||||
handler = SwaglogRotatingFileHandler(base_filename)
|
||||
return handler
|
||||
|
||||
class SwaglogRotatingFileHandler(BaseRotatingHandler):
|
||||
def __init__(self, base_filename, interval=60, max_bytes=1024*256, backup_count=2500, encoding=None):
|
||||
super().__init__(base_filename, mode="a", encoding=encoding, delay=True)
|
||||
self.base_filename = base_filename
|
||||
self.interval = interval # seconds
|
||||
self.max_bytes = max_bytes
|
||||
self.backup_count = backup_count
|
||||
self.log_files = self.get_existing_logfiles()
|
||||
log_indexes = [f.split(".")[-1] for f in self.log_files]
|
||||
self.last_file_idx = max([int(i) for i in log_indexes if i.isdigit()] or [-1])
|
||||
self.last_rollover = None
|
||||
self.doRollover()
|
||||
|
||||
def _open(self):
|
||||
self.last_rollover = time.monotonic()
|
||||
self.last_file_idx += 1
|
||||
next_filename = f"{self.base_filename}.{self.last_file_idx:010}"
|
||||
stream = open(next_filename, self.mode, encoding=self.encoding)
|
||||
self.log_files.insert(0, next_filename)
|
||||
return stream
|
||||
|
||||
def get_existing_logfiles(self):
|
||||
log_files = list()
|
||||
base_dir = os.path.dirname(self.base_filename)
|
||||
for fn in os.listdir(base_dir):
|
||||
fp = os.path.join(base_dir, fn)
|
||||
if fp.startswith(self.base_filename) and os.path.isfile(fp):
|
||||
log_files.append(fp)
|
||||
return sorted(log_files)
|
||||
|
||||
def shouldRollover(self, record):
|
||||
size_exceeded = self.max_bytes > 0 and self.stream.tell() >= self.max_bytes
|
||||
time_exceeded = self.interval > 0 and self.last_rollover + self.interval <= time.monotonic()
|
||||
return size_exceeded or time_exceeded
|
||||
|
||||
def doRollover(self):
|
||||
if self.stream:
|
||||
self.stream.close()
|
||||
self.stream = self._open()
|
||||
|
||||
if self.backup_count > 0:
|
||||
while len(self.log_files) > self.backup_count:
|
||||
to_delete = self.log_files.pop()
|
||||
if os.path.exists(to_delete): # just being safe, should always exist
|
||||
os.remove(to_delete)
|
||||
|
||||
class UnixDomainSocketHandler(logging.Handler):
|
||||
def __init__(self, formatter):
|
||||
logging.Handler.__init__(self)
|
||||
self.setFormatter(formatter)
|
||||
self.pid = None
|
||||
|
||||
self.zctx = None
|
||||
self.sock = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def close(self):
|
||||
if self.sock is not None:
|
||||
self.sock.close()
|
||||
if self.zctx is not None:
|
||||
self.zctx.term()
|
||||
|
||||
def connect(self):
|
||||
self.zctx = zmq.Context()
|
||||
self.sock = self.zctx.socket(zmq.PUSH)
|
||||
self.sock.setsockopt(zmq.LINGER, 10)
|
||||
self.sock.connect(Paths.swaglog_ipc())
|
||||
self.pid = os.getpid()
|
||||
|
||||
def emit(self, record):
|
||||
if os.getpid() != self.pid:
|
||||
# TODO suppresses warning about forking proc with zmq socket, fix root cause
|
||||
warnings.filterwarnings("ignore", category=ResourceWarning, message="unclosed.*<zmq.*>")
|
||||
self.connect()
|
||||
|
||||
msg = self.format(record).rstrip('\n')
|
||||
# print("SEND".format(repr(msg)))
|
||||
try:
|
||||
s = chr(record.levelno)+msg
|
||||
self.sock.send(s.encode('utf8'), zmq.NOBLOCK)
|
||||
except zmq.error.Again:
|
||||
# drop :/
|
||||
pass
|
||||
|
||||
|
||||
class ForwardingHandler(logging.Handler):
|
||||
def __init__(self, target_logger):
|
||||
super().__init__()
|
||||
self.target_logger = target_logger
|
||||
|
||||
def emit(self, record):
|
||||
self.target_logger.handle(record)
|
||||
|
||||
|
||||
def add_file_handler(log):
|
||||
"""
|
||||
Function to add the file log handler to swaglog.
|
||||
This can be used to store logs when logmessaged is not running.
|
||||
"""
|
||||
handler = get_file_handler()
|
||||
handler.setFormatter(SwagLogFileFormatter(log))
|
||||
log.addHandler(handler)
|
||||
|
||||
|
||||
cloudlog = log = SwagLogger()
|
||||
log.setLevel(logging.DEBUG)
|
||||
|
||||
|
||||
outhandler = logging.StreamHandler()
|
||||
|
||||
print_level = os.environ.get('LOGPRINT', 'warning')
|
||||
if print_level == 'debug':
|
||||
outhandler.setLevel(logging.DEBUG)
|
||||
elif print_level == 'info':
|
||||
outhandler.setLevel(logging.INFO)
|
||||
elif print_level == 'warning':
|
||||
outhandler.setLevel(logging.WARNING)
|
||||
|
||||
ipchandler = UnixDomainSocketHandler(SwagFormatter(log))
|
||||
|
||||
log.addHandler(outhandler)
|
||||
# logs are sent through IPC before writing to disk to prevent disk I/O blocking
|
||||
log.addHandler(ipchandler)
|
||||
@@ -0,0 +1 @@
|
||||
test_common
|
||||
@@ -0,0 +1,19 @@
|
||||
import os
|
||||
from uuid import uuid4
|
||||
|
||||
from openpilot.common.file_helpers import atomic_write_in_dir
|
||||
|
||||
|
||||
class TestFileHelpers:
|
||||
def run_atomic_write_func(self, atomic_write_func):
|
||||
path = f"/tmp/tmp{uuid4()}"
|
||||
with atomic_write_func(path) as f:
|
||||
f.write("test")
|
||||
assert not os.path.exists(path)
|
||||
|
||||
with open(path) as f:
|
||||
assert f.read() == "test"
|
||||
os.remove(path)
|
||||
|
||||
def test_atomic_write_in_dir(self):
|
||||
self.run_atomic_write_func(atomic_write_in_dir)
|
||||
@@ -0,0 +1,15 @@
|
||||
import os
|
||||
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
from openpilot.common.markdown import parse_markdown
|
||||
|
||||
|
||||
class TestMarkdown:
|
||||
def test_all_release_notes(self):
|
||||
with open(os.path.join(BASEDIR, "RELEASES.md")) as f:
|
||||
release_notes = f.read().split("\n\n")
|
||||
assert len(release_notes) > 10
|
||||
|
||||
for rn in release_notes:
|
||||
md = parse_markdown(rn)
|
||||
assert len(md) > 0
|
||||
@@ -0,0 +1,109 @@
|
||||
import pytest
|
||||
import os
|
||||
import threading
|
||||
import time
|
||||
import uuid
|
||||
|
||||
from openpilot.common.params import Params, ParamKeyType, UnknownKeyName
|
||||
|
||||
class TestParams:
|
||||
def setup_method(self):
|
||||
self.params = Params()
|
||||
|
||||
def test_params_put_and_get(self):
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("DongleId") == b"cb38263377b873ee"
|
||||
|
||||
def test_params_non_ascii(self):
|
||||
st = b"\xe1\x90\xff"
|
||||
self.params.put("CarParams", st)
|
||||
assert self.params.get("CarParams") == st
|
||||
|
||||
def test_params_get_cleared_manager_start(self):
|
||||
self.params.put("CarParams", "test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
|
||||
undefined_param = self.params.get_param_path(uuid.uuid4().hex)
|
||||
with open(undefined_param, "w") as f:
|
||||
f.write("test")
|
||||
assert os.path.isfile(undefined_param)
|
||||
|
||||
self.params.clear_all(ParamKeyType.CLEAR_ON_MANAGER_START)
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
assert not os.path.isfile(undefined_param)
|
||||
|
||||
def test_params_two_things(self):
|
||||
self.params.put("DongleId", "bob")
|
||||
self.params.put("AthenadPid", "123")
|
||||
assert self.params.get("DongleId") == b"bob"
|
||||
assert self.params.get("AthenadPid") == b"123"
|
||||
|
||||
def test_params_get_block(self):
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("CarParams", True) == b"test"
|
||||
|
||||
def test_params_unknown_key_fails(self):
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.get("swag")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.get_bool("swag")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.put("swag", "abc")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.put_bool("swag", True)
|
||||
|
||||
def test_remove_not_there(self):
|
||||
assert self.params.get("CarParams") is None
|
||||
self.params.remove("CarParams")
|
||||
assert self.params.get("CarParams") is None
|
||||
|
||||
def test_get_bool(self):
|
||||
self.params.remove("IsMetric")
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put_bool("IsMetric", True)
|
||||
assert self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put_bool("IsMetric", False)
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put("IsMetric", "1")
|
||||
assert self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put("IsMetric", "0")
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
def test_put_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_nonblocking("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"test"
|
||||
|
||||
def test_put_bool_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_bool_nonblocking("CarParams", True)
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"1"
|
||||
|
||||
def test_params_all_keys(self):
|
||||
keys = Params().all_keys()
|
||||
|
||||
# sanity checks
|
||||
assert len(keys) > 20
|
||||
assert len(keys) == len(set(keys))
|
||||
assert b"CarParams" in keys
|
||||
@@ -0,0 +1,29 @@
|
||||
from openpilot.common.simple_kalman import KF1D
|
||||
|
||||
|
||||
class TestSimpleKalman:
|
||||
def setup_method(self):
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
self.kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
|
||||
def test_getter_setter(self):
|
||||
self.kf.set_x([[1.0], [1.0]])
|
||||
assert self.kf.x == [[1.0], [1.0]]
|
||||
|
||||
def update_returns_state(self):
|
||||
x = self.kf.update(100)
|
||||
assert x == self.kf.x
|
||||
Executable
+63
@@ -0,0 +1,63 @@
|
||||
#!/usr/bin/env python3
|
||||
import os
|
||||
import time
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class TextWindow:
|
||||
def __init__(self, text):
|
||||
try:
|
||||
self.text_proc = subprocess.Popen(["./text", text],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "selfdrive", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.text_proc = None
|
||||
|
||||
def get_status(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.poll()
|
||||
return self.text_proc.returncode
|
||||
return None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def close(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.terminate()
|
||||
self.text_proc = None
|
||||
|
||||
def wait_for_exit(self):
|
||||
if self.text_proc is not None:
|
||||
while True:
|
||||
if self.get_status() == 1:
|
||||
return
|
||||
time.sleep(0.1)
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
text = """Traceback (most recent call last):
|
||||
File "./controlsd.py", line 608, in <module>
|
||||
main()
|
||||
File "./controlsd.py", line 604, in main
|
||||
controlsd_thread(sm, pm, logcan)
|
||||
File "./controlsd.py", line 455, in controlsd_thread
|
||||
1/0
|
||||
ZeroDivisionError: division by zero"""
|
||||
print(text)
|
||||
|
||||
with TextWindow(text) as s:
|
||||
for _ in range(100):
|
||||
if s.get_status() == 1:
|
||||
print("Got exit button")
|
||||
break
|
||||
time.sleep(0.1)
|
||||
print("gone")
|
||||
@@ -0,0 +1,15 @@
|
||||
import datetime
|
||||
from pathlib import Path
|
||||
|
||||
MIN_DATE = datetime.datetime(year=2025, month=2, day=21)
|
||||
|
||||
def min_date():
|
||||
# on systemd systems, the default time is the systemd build time
|
||||
systemd_path = Path("/lib/systemd/systemd")
|
||||
if systemd_path.exists():
|
||||
d = datetime.datetime.fromtimestamp(systemd_path.stat().st_mtime)
|
||||
return max(MIN_DATE, d + datetime.timedelta(days=1))
|
||||
return MIN_DATE
|
||||
|
||||
def system_time_valid():
|
||||
return datetime.datetime.now() > min_date()
|
||||
@@ -0,0 +1,27 @@
|
||||
import signal
|
||||
|
||||
class TimeoutException(Exception):
|
||||
pass
|
||||
|
||||
class Timeout:
|
||||
"""
|
||||
Timeout context manager.
|
||||
For example this code will raise a TimeoutException:
|
||||
with Timeout(seconds=5, error_msg="Sleep was too long"):
|
||||
time.sleep(10)
|
||||
"""
|
||||
def __init__(self, seconds, error_msg=None):
|
||||
if error_msg is None:
|
||||
error_msg = f'Timed out after {seconds} seconds'
|
||||
self.seconds = seconds
|
||||
self.error_msg = error_msg
|
||||
|
||||
def handle_timeout(self, signume, frame):
|
||||
raise TimeoutException(self.error_msg)
|
||||
|
||||
def __enter__(self):
|
||||
signal.signal(signal.SIGALRM, self.handle_timeout)
|
||||
signal.alarm(self.seconds)
|
||||
|
||||
def __exit__(self, exc_type, exc_val, exc_tb):
|
||||
signal.alarm(0)
|
||||
@@ -0,0 +1,51 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <ctime>
|
||||
|
||||
#ifdef __APPLE__
|
||||
#define CLOCK_BOOTTIME CLOCK_MONOTONIC
|
||||
#endif
|
||||
|
||||
static inline uint64_t nanos_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double millis_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000.0 + t.tv_nsec * 1e-6;
|
||||
}
|
||||
|
||||
static inline double seconds_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double seconds_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
// you probably should use nanos_since_boot instead
|
||||
static inline uint64_t nanos_monotonic() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_monotonic_raw() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC_RAW, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
@@ -0,0 +1,2 @@
|
||||
transformations
|
||||
transformations.cpp
|
||||
@@ -0,0 +1,70 @@
|
||||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for visualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 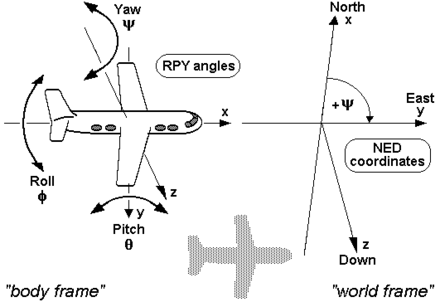|
|
||||
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in. <br> More details below. <br>|
|
||||
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road. <br> More details below. <br>|
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventions
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Car frame
|
||||
------
|
||||
Device frame is aligned with the road-facing camera used by openpilot. However, when controlling the vehicle it is helpful to think in a reference frame aligned with the vehicle. These two reference frames can be different.
|
||||
|
||||
The orientation of car frame is defined to be aligned with the car's direction of travel and the road plane when the vehicle is driving on a flat road and not turning. The origin of car frame is defined to be directly below device frame (in car frame), such that it is on the road plane. The position and orientation of this frame is not necessarily always aligned with the direction of travel or the road plane due to suspension movements and other effects.
|
||||
|
||||
|
||||
Calibrated frame
|
||||
------
|
||||
It is helpful for openpilot's driving model to take in images that look similar when mounted differently in different cars. To achieve this we "calibrate" the images by transforming it into calibrated frame. Calibrated frame is defined to be aligned with car frame in pitch and yaw, and aligned with device frame in roll. It also has the same origin as device frame.
|
||||
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user