mirror of
https://github.com/dragonpilot/dragonpilot.git
synced 2026-06-23 06:52:07 +08:00
dragonpilot v0.10.2
This commit is contained in:
@@ -0,0 +1,18 @@
|
||||
**/.git
|
||||
.DS_Store
|
||||
*.dylib
|
||||
*.DSYM
|
||||
*.d
|
||||
*.pyc
|
||||
*.pyo
|
||||
.*.swp
|
||||
.*.swo
|
||||
.*.un~
|
||||
*.tmp
|
||||
*.o
|
||||
*.o-*
|
||||
*.os
|
||||
*.os-*
|
||||
|
||||
venv/
|
||||
.venv/
|
||||
@@ -0,0 +1,11 @@
|
||||
root = true
|
||||
|
||||
[*]
|
||||
end_of_line = lf
|
||||
insert_final_newline = true
|
||||
trim_trailing_whitespace = true
|
||||
|
||||
[*.{py,pyx,pxd}]
|
||||
charset = utf-8
|
||||
indent_style = space
|
||||
indent_size = 2
|
||||
@@ -0,0 +1,47 @@
|
||||
name: Bug report
|
||||
description: For issues with running openpilot on your comma device
|
||||
labels: ["bug"]
|
||||
body:
|
||||
|
||||
- type: markdown
|
||||
attributes:
|
||||
value: >
|
||||
Before creating a **bug report**, please check the following:
|
||||
* If the issue likely only affects your car model or make, go back and open a **car bug report** instead.
|
||||
* If the issue is related to the driving or driver monitoring models, you should open a [discussion](https://github.com/commaai/openpilot/discussions/categories/model-feedback) instead.
|
||||
* Ensure you're running the latest openpilot release.
|
||||
* Ensure you're using officially supported hardware. Issues running on PCs have a different issue template.
|
||||
* Ensure there isn't an existing issue for your bug. If there is, leave a comment on the existing issue.
|
||||
* Ensure you're running stock openpilot. We cannot look into bug reports from forks.
|
||||
|
||||
If you're unsure whether you've hit a bug, check out the #installation-help channel in the [community Discord server](https://discord.comma.ai).
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Describe the bug
|
||||
description: Also include a description of how to reproduce the bug
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
id: route
|
||||
attributes:
|
||||
label: Provide a route where the issue occurs
|
||||
description: Ensure the route is fully uploaded at https://useradmin.comma.ai. We cannot look into issues without routes, or at least a Dongle ID.
|
||||
placeholder: 77611a1fac303767|2020-05-11--16-37-07
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
id: version
|
||||
attributes:
|
||||
label: openpilot version
|
||||
description: If you're not on release, provide the commit hash
|
||||
placeholder: 0.8.10
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Additional info
|
||||
|
||||
@@ -0,0 +1,14 @@
|
||||
blank_issues_enabled: false
|
||||
contact_links:
|
||||
- name: Car bug report
|
||||
url: https://github.com/commaai/opendbc/issues/new
|
||||
about: For issues with a particular car make or model
|
||||
- name: Join the Discord
|
||||
url: https://discord.comma.ai
|
||||
about: The community Discord is for both openpilot development and experience discussion
|
||||
- name: Report driving behavior feedback
|
||||
url: https://discord.com/channels/469524606043160576/1254834193066623017
|
||||
about: Feedback for the driving and driver monitoring models goes in the #driving-feedback in Discord
|
||||
- name: Community Wiki
|
||||
url: https://github.com/commaai/openpilot/wiki
|
||||
about: Check out our community wiki
|
||||
@@ -0,0 +1,8 @@
|
||||
---
|
||||
name: Enhancement
|
||||
about: For openpilot enhancement suggestions
|
||||
title: ''
|
||||
labels: 'enhancement'
|
||||
assignees: ''
|
||||
---
|
||||
|
||||
@@ -0,0 +1,42 @@
|
||||
name: PC bug report
|
||||
description: For issues with running openpilot on PC
|
||||
labels: ["PC"]
|
||||
body:
|
||||
|
||||
- type: markdown
|
||||
attributes:
|
||||
value: >
|
||||
Before creating a **bug report**, please check the following:
|
||||
* Ensure you're running the latest openpilot release.
|
||||
* Ensure there isn't an existing issue for your bug. If there is, leave a comment on the existing issue.
|
||||
* Ensure you're running stock openpilot. We cannot look into bug reports from forks.
|
||||
|
||||
If you're unsure whether you've hit a bug, check out the #installation-help channel in the [community Discord server](https://discord.comma.ai).
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Describe the bug
|
||||
description: Also include a description of how to reproduce the bug
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
id: os-version
|
||||
attributes:
|
||||
label: OS Version
|
||||
placeholder: Ubuntu 24.04
|
||||
validations:
|
||||
required: true
|
||||
|
||||
- type: input
|
||||
id: version
|
||||
attributes:
|
||||
label: openpilot version or commit
|
||||
placeholder: bd36f2ec8d3559909678eff2690c10a520938367
|
||||
validations:
|
||||
required: false
|
||||
|
||||
- type: textarea
|
||||
attributes:
|
||||
label: Additional info
|
||||
|
||||
@@ -0,0 +1,27 @@
|
||||
CI / testing:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: "{.github/**,**/test_*,**/test/**,Jenkinsfile}"
|
||||
|
||||
car:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: '{selfdrive/car/**,opendbc_repo}'
|
||||
|
||||
simulation:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: 'tools/sim/**'
|
||||
|
||||
ui:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: '{selfdrive/assets/**,selfdrive/ui/**,system/ui/**}'
|
||||
|
||||
tools:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: 'tools/**'
|
||||
|
||||
multilanguage:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: 'selfdrive/ui/translations/**'
|
||||
|
||||
autonomy:
|
||||
- changed-files:
|
||||
- any-glob-to-all-files: "{selfdrive/modeld/models/**,selfdrive/test/process_replay/model_replay_ref_commit}"
|
||||
@@ -0,0 +1,68 @@
|
||||
<!-- Please copy and paste the relevant template -->
|
||||
|
||||
<!--- ***** Template: Fingerprint *****
|
||||
|
||||
**Car**
|
||||
Which car (make, model, year) this fingerprint is for
|
||||
|
||||
**Route**
|
||||
A route with the fingerprint
|
||||
|
||||
-->
|
||||
|
||||
<!--- ***** Template: Car Bugfix *****
|
||||
|
||||
**Description**
|
||||
|
||||
A description of the bug and the fix. Also link the issue if it exists.
|
||||
|
||||
**Verification**
|
||||
|
||||
Explain how you tested this bug fix.
|
||||
|
||||
**Route**
|
||||
|
||||
Route: [a route with the bug fix]
|
||||
|
||||
|
||||
-->
|
||||
|
||||
<!--- ***** Template: Bugfix *****
|
||||
|
||||
**Description**
|
||||
|
||||
A description of the bug and the fix. Also link the issue if it exists.
|
||||
|
||||
**Verification**
|
||||
|
||||
Explain how you tested this bug fix.
|
||||
|
||||
|
||||
-->
|
||||
|
||||
<!--- ***** Template: Car Port *****
|
||||
|
||||
**Checklist**
|
||||
|
||||
- [ ] added entry to CAR in selfdrive/car/*/values.py and ran `selfdrive/car/docs.py` to generate new docs
|
||||
- [ ] test route added to [routes.py](https://github.com/commaai/openpilot/blob/master/selfdrive/car/tests/routes.py)
|
||||
- [ ] route with openpilot:
|
||||
- [ ] route with stock system:
|
||||
- [ ] car harness used (if comma doesn't sell it, put N/A):
|
||||
|
||||
|
||||
-->
|
||||
|
||||
<!--- ***** Template: Refactor *****
|
||||
|
||||
**Description**
|
||||
|
||||
A description of the refactor, including the goals it accomplishes.
|
||||
|
||||
**Verification**
|
||||
|
||||
Explain how you tested the refactor for regressions.
|
||||
|
||||
|
||||
-->
|
||||
|
||||
+100
@@ -0,0 +1,100 @@
|
||||
venv/
|
||||
.venv/
|
||||
.ci_cache
|
||||
.env
|
||||
.clang-format
|
||||
.DS_Store
|
||||
.tags
|
||||
.ipynb_checkpoints
|
||||
.idea
|
||||
.overlay_init
|
||||
.overlay_consistent
|
||||
.sconsign.dblite
|
||||
a.out
|
||||
.hypothesis
|
||||
.cache/
|
||||
|
||||
/docs_site/
|
||||
|
||||
*.mp4
|
||||
*.dylib
|
||||
*.DSYM
|
||||
*.d
|
||||
*.pyc
|
||||
*.pyo
|
||||
.*.swp
|
||||
.*.swo
|
||||
.*.un~
|
||||
*.tmp
|
||||
*.o
|
||||
*.o-*
|
||||
*.os
|
||||
*.os-*
|
||||
*.so
|
||||
*.a
|
||||
*.clb
|
||||
*.class
|
||||
*.pyxbldc
|
||||
*.vcd
|
||||
*.mo
|
||||
*_pyx.cpp
|
||||
*.stats
|
||||
config.json
|
||||
clcache
|
||||
compile_commands.json
|
||||
compare_runtime*.html
|
||||
|
||||
selfdrive/pandad/pandad
|
||||
cereal/services.h
|
||||
cereal/gen
|
||||
cereal/messaging/bridge
|
||||
selfdrive/ui/translations/tmp
|
||||
selfdrive/car/tests/cars_dump
|
||||
system/camerad/camerad
|
||||
system/camerad/test/ae_gray_test
|
||||
|
||||
.coverage*
|
||||
coverage.xml
|
||||
htmlcov
|
||||
pandaextra
|
||||
|
||||
.mypy_cache/
|
||||
flycheck_*
|
||||
|
||||
cppcheck_report.txt
|
||||
comma*.sh
|
||||
|
||||
selfdrive/modeld/models/*.pkl
|
||||
|
||||
# openpilot log files
|
||||
*.bz2
|
||||
*.zst
|
||||
|
||||
build/
|
||||
|
||||
!**/.gitkeep
|
||||
|
||||
poetry.toml
|
||||
Pipfile
|
||||
|
||||
### VisualStudioCode ###
|
||||
.vscode/*
|
||||
!.vscode/settings.json
|
||||
!.vscode/tasks.json
|
||||
!.vscode/launch.json
|
||||
!.vscode/extensions.json
|
||||
!.vscode/*.code-snippets
|
||||
|
||||
# Local History for Visual Studio Code
|
||||
.history/
|
||||
|
||||
# Built Visual Studio Code Extensions
|
||||
*.vsix
|
||||
|
||||
### VisualStudioCode Patch ###
|
||||
# Ignore all local history of files
|
||||
.history
|
||||
.ionide
|
||||
|
||||
# rick - keep panda_tici standalone
|
||||
panda_tici/
|
||||
Vendored
+11
@@ -0,0 +1,11 @@
|
||||
{
|
||||
"recommendations": [
|
||||
"ms-python.python",
|
||||
"ms-vscode.cpptools",
|
||||
"elagil.pre-commit-helper",
|
||||
"charliermarsh.ruff",
|
||||
"JamiTech.simply-blame",
|
||||
"k--kato.intellij-idea-keybindings",
|
||||
"trinm1709.dracula-theme-from-intellij"
|
||||
]
|
||||
}
|
||||
Vendored
+85
@@ -0,0 +1,85 @@
|
||||
{
|
||||
"version": "0.2.0",
|
||||
"inputs": [
|
||||
{
|
||||
"id": "python_process",
|
||||
"type": "pickString",
|
||||
"description": "Select the process to debug",
|
||||
"options": [
|
||||
"selfdrive/controls/controlsd.py",
|
||||
"system/timed/timed.py",
|
||||
"tools/sim/run_bridge.py"
|
||||
]
|
||||
},
|
||||
{
|
||||
"id": "cpp_process",
|
||||
"type": "pickString",
|
||||
"description": "Select the process to debug",
|
||||
"options": [
|
||||
"selfdrive/ui/ui"
|
||||
]
|
||||
},
|
||||
{
|
||||
"id": "args",
|
||||
"description": "Arguments to pass to the process",
|
||||
"type": "promptString"
|
||||
},
|
||||
{
|
||||
"id": "replayArg",
|
||||
"type": "promptString",
|
||||
"description": "Enter route or segment to replay."
|
||||
}
|
||||
],
|
||||
"configurations": [
|
||||
{
|
||||
"name": "Python: openpilot Process",
|
||||
"type": "debugpy",
|
||||
"request": "launch",
|
||||
"program": "${input:python_process}",
|
||||
"console": "integratedTerminal",
|
||||
"justMyCode": true,
|
||||
"args": "${input:args}"
|
||||
},
|
||||
{
|
||||
"name": "C++: openpilot Process",
|
||||
"type": "cppdbg",
|
||||
"request": "launch",
|
||||
"program": "${workspaceFolder}/${input:cpp_process}",
|
||||
"cwd": "${workspaceFolder}"
|
||||
},
|
||||
{
|
||||
"name": "Attach LLDB to Replay drive",
|
||||
"type": "lldb",
|
||||
"request": "attach",
|
||||
"pid": "${command:pickMyProcess}",
|
||||
"initCommands": [
|
||||
"script import time; time.sleep(3)"
|
||||
]
|
||||
},
|
||||
{
|
||||
"name": "Replay drive",
|
||||
"type": "debugpy",
|
||||
"request": "launch",
|
||||
"program": "${workspaceFolder}/opendbc/safety/tests/safety_replay/replay_drive.py",
|
||||
"args": [
|
||||
"${input:replayArg}"
|
||||
],
|
||||
"console": "integratedTerminal",
|
||||
"justMyCode": false,
|
||||
"env": {
|
||||
"PYTHONPATH": "${workspaceFolder}"
|
||||
},
|
||||
"subProcess": true,
|
||||
"stopOnEntry": false
|
||||
}
|
||||
],
|
||||
"compounds": [
|
||||
{
|
||||
"name": "Replay drive + Safety LLDB",
|
||||
"configurations": [
|
||||
"Replay drive",
|
||||
"Attach LLDB to Replay drive"
|
||||
]
|
||||
}
|
||||
]
|
||||
}
|
||||
Vendored
+42
@@ -0,0 +1,42 @@
|
||||
{
|
||||
"editor.tabSize": 2,
|
||||
"editor.insertSpaces": true,
|
||||
"editor.renderWhitespace": "trailing",
|
||||
"files.trimTrailingWhitespace": true,
|
||||
"terminal.integrated.defaultProfile.linux": "dragonpilot",
|
||||
"terminal.integrated.profiles.linux": {
|
||||
"dragonpilot": {
|
||||
"path": "bash",
|
||||
"args": ["-c", "distrobox enter dp"]
|
||||
}
|
||||
},
|
||||
"search.exclude": {
|
||||
"**/.git": true,
|
||||
"**/.venv": true,
|
||||
"**/__pycache__": true,
|
||||
"msgq_repo/": true,
|
||||
"opendbc/": true,
|
||||
"rednose/": true,
|
||||
"rednose_repo/": true,
|
||||
"openpilot/": true,
|
||||
"teleoprtc_repo/": true,
|
||||
"tinygrad/": true,
|
||||
"tinygrad_repo/": true
|
||||
},
|
||||
"files.exclude": {
|
||||
"**/.git": true,
|
||||
"**/.venv": true,
|
||||
"**/__pycache__": true
|
||||
},
|
||||
"python.analysis.exclude": [
|
||||
"**/.git",
|
||||
"**/.venv",
|
||||
"**/__pycache__",
|
||||
// exclude directories that should be using the symlinked version
|
||||
"common/**",
|
||||
"selfdrive/**",
|
||||
"system/**",
|
||||
"third_party/**",
|
||||
"tools/**",
|
||||
]
|
||||
}
|
||||
+89
@@ -0,0 +1,89 @@
|
||||
```mermaid
|
||||
flowchart TD
|
||||
B000["devel-staging"] ---> CORE["core"]
|
||||
CORE ---> CORE_001["core-feat/params"]
|
||||
CORE_001 ---> CORE_002["core-feat/panel"]
|
||||
CORE_002 ---> MIN["min"]
|
||||
MIN ---> MIN_001["min-feat/dev/c3"]
|
||||
MIN ---> MIN_002["min-feat/dev/o3"]
|
||||
MIN ---> MIN_003["min-feat/lat/alka"]
|
||||
MIN ---> MIN_004["min-feat/ui/display-mode"]
|
||||
MIN ---> MIN_005["min-feat/dev/model-selector"]
|
||||
MIN ---> MIN_006["min-feat/lat/lca"]
|
||||
MIN ---> MIN_007["min-feat/dev/on-off-road"]
|
||||
MIN ---> MIN_008["min-feat/ui/hide-hud"]
|
||||
MIN ---> MIN_009["min-feat/lon/ext-radar"]
|
||||
MIN ---> MIN_010["min-feat/lat/road-edge-detection"]
|
||||
MIN ---> MIN_011["min-feat/ui/rainbow-path"]
|
||||
MIN ---> MIN_012["min-feat/lon/acm"]
|
||||
MIN ---> MIN_013["min-feat/lon/aem"]
|
||||
MIN ---> MIN_014["min-feat/lon/dtsc"]
|
||||
MIN ---> MIN_015["min-feat/dev/alert-mode"]
|
||||
MIN ---> MIN_016["min-feat/dev/auto-shutdown"]
|
||||
MIN ---> MIN_017["min-feat/ui/lead-stats"]
|
||||
MIN ---> MIN_018["min-feat/ui/border-indicator"]
|
||||
MIN ---> MIN_019["min-feat/dev/dashy"]
|
||||
MIN ---> MIN_010["min-feat/dev/delay-loggerd"]
|
||||
MIN ---> MIN_021["min-feat/dev/disable-connect"]
|
||||
MIN ---> MIN_022["min-feat/dev/tether-on-boot"]
|
||||
MIN_001 ---> FULL["full"]
|
||||
MIN_002 ---> FULL
|
||||
MIN_003 ---> FULL
|
||||
MIN_004 ---> FULL
|
||||
MIN_005 ---> FULL
|
||||
MIN_006 ---> FULL
|
||||
MIN_007 ---> FULL
|
||||
MIN_008 ---> FULL
|
||||
MIN_009 ---> FULL
|
||||
MIN_010 ---> FULL
|
||||
MIN_011 ---> FULL
|
||||
MIN_012 ---> FULL
|
||||
MIN_013 ---> FULL
|
||||
MIN_014 ---> FULL
|
||||
MIN_015 ---> FULL
|
||||
MIN_016 ---> FULL
|
||||
MIN_017 ---> FULL
|
||||
MIN_018 ---> FULL
|
||||
MIN_019 ---> FULL
|
||||
MIN_020 ---> FULL
|
||||
MIN_021 ---> FULL
|
||||
MIN_022 ---> FULL
|
||||
FULL ---> TOYOTA_001[brand/toyota/safety-common]
|
||||
FULL ---> TOYOTA_002[brand/toyota/door-auto-lock-unlock]
|
||||
FULL ---> TOYOTA_003[brand/toyota/tss1-sng]
|
||||
FULL ---> TOYOTA_004[brand/toyota/radar-filter]
|
||||
FULL ---> TOYOTA_005[brand/toyota/sdsu]
|
||||
FULL ---> TOYOTA_006[brand/toyota/dsu-bypass]
|
||||
FULL ---> TOYOTA_007[brand/toyota/zss]
|
||||
FULL ---> TOYOTA_008[brand/toyota/stock-lon]
|
||||
FULL ---> VAG_001[brand/vag/a0-sng]
|
||||
FULL ---> VAG_002[brand/vag/pq-steering-patch]
|
||||
FULL ---> VAG_003[brand/vag/pq-no-dashcam]
|
||||
FULL ---> VAG_004[brand/vag/avoid-eps-lockout]
|
||||
FULL ---> HKG_001[brand/hkg/smdps]
|
||||
FULL ---> HONDA_001[brand/honda/eps-mod]
|
||||
FULL ---> SUBARU_001[brand/subaru/torque-3071]
|
||||
TOYOTA_001 ---> TOYOTA[pre-toyota]
|
||||
TOYOTA_002 ---> TOYOTA
|
||||
TOYOTA_003 ---> TOYOTA
|
||||
TOYOTA_004 ---> TOYOTA
|
||||
TOYOTA_005 ---> TOYOTA
|
||||
TOYOTA_006 ---> TOYOTA
|
||||
TOYOTA_007 ---> TOYOTA
|
||||
TOYOTA_008 ---> TOYOTA
|
||||
VAG_001 ---> VAG[pre-vag]
|
||||
VAG_002 ---> VAG
|
||||
VAG_003 ---> VAG
|
||||
VAG_004 ---> VAG
|
||||
HKG_001 ---> HKG[pre-hkg]
|
||||
HONDA_001 ---> HONDA[pre-honda]
|
||||
SUBARU_001 ---> SUBARU[pre-subaru]
|
||||
TOYOTA ---> PRE[pre]
|
||||
VAG ---> PRE
|
||||
HKG ---> PRE
|
||||
HONDA ---> PRE
|
||||
SUBARU ---> PRE
|
||||
PRE ---> PRE_PATCH[pre-patch]
|
||||
PRE_PATCH ---> PREBUILD[pre-build]
|
||||
PREBUILD ---> VERSION[x.x.x]
|
||||
```
|
||||
+1772
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,14 @@
|
||||
FROM ghcr.io/commaai/openpilot-base:latest
|
||||
|
||||
ENV PYTHONUNBUFFERED=1
|
||||
|
||||
ENV OPENPILOT_PATH=/home/batman/openpilot
|
||||
|
||||
RUN mkdir -p ${OPENPILOT_PATH}
|
||||
WORKDIR ${OPENPILOT_PATH}
|
||||
|
||||
COPY . ${OPENPILOT_PATH}/
|
||||
|
||||
ENV UV_BIN="/home/batman/.local/bin/"
|
||||
ENV PATH="$UV_BIN:$PATH"
|
||||
RUN UV_PROJECT_ENVIRONMENT=$VIRTUAL_ENV uv run scons --cache-readonly -j$(nproc)
|
||||
@@ -0,0 +1,81 @@
|
||||
FROM ubuntu:24.04
|
||||
|
||||
ENV PYTHONUNBUFFERED=1
|
||||
|
||||
ENV DEBIAN_FRONTEND=noninteractive
|
||||
RUN apt-get update && \
|
||||
apt-get install -y --no-install-recommends sudo tzdata locales ssh pulseaudio xvfb x11-xserver-utils gnome-screenshot python3-tk python3-dev && \
|
||||
rm -rf /var/lib/apt/lists/*
|
||||
|
||||
RUN sed -i -e 's/# en_US.UTF-8 UTF-8/en_US.UTF-8 UTF-8/' /etc/locale.gen && locale-gen
|
||||
ENV LANG=en_US.UTF-8
|
||||
ENV LANGUAGE=en_US:en
|
||||
ENV LC_ALL=en_US.UTF-8
|
||||
|
||||
COPY tools/install_ubuntu_dependencies.sh /tmp/tools/
|
||||
RUN /tmp/tools/install_ubuntu_dependencies.sh && \
|
||||
rm -rf /var/lib/apt/lists/* /tmp/* && \
|
||||
cd /usr/lib/gcc/arm-none-eabi/* && \
|
||||
rm -rf arm/ thumb/nofp thumb/v6* thumb/v8* thumb/v7+fp thumb/v7-r+fp.sp
|
||||
|
||||
# Add OpenCL
|
||||
RUN apt-get update && apt-get install -y --no-install-recommends \
|
||||
apt-utils \
|
||||
alien \
|
||||
unzip \
|
||||
tar \
|
||||
curl \
|
||||
xz-utils \
|
||||
dbus \
|
||||
gcc-arm-none-eabi \
|
||||
tmux \
|
||||
vim \
|
||||
libx11-6 \
|
||||
wget \
|
||||
&& rm -rf /var/lib/apt/lists/*
|
||||
|
||||
RUN mkdir -p /tmp/opencl-driver-intel && \
|
||||
cd /tmp/opencl-driver-intel && \
|
||||
wget https://github.com/intel/llvm/releases/download/2024-WW14/oclcpuexp-2024.17.3.0.09_rel.tar.gz && \
|
||||
wget https://github.com/oneapi-src/oneTBB/releases/download/v2021.12.0/oneapi-tbb-2021.12.0-lin.tgz && \
|
||||
mkdir -p /opt/intel/oclcpuexp_2024.17.3.0.09_rel && \
|
||||
cd /opt/intel/oclcpuexp_2024.17.3.0.09_rel && \
|
||||
tar -zxvf /tmp/opencl-driver-intel/oclcpuexp-2024.17.3.0.09_rel.tar.gz && \
|
||||
mkdir -p /etc/OpenCL/vendors && \
|
||||
echo /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64/libintelocl.so > /etc/OpenCL/vendors/intel_expcpu.icd && \
|
||||
cd /opt/intel && \
|
||||
tar -zxvf /tmp/opencl-driver-intel/oneapi-tbb-2021.12.0-lin.tgz && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbb.so /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbbmalloc.so /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbb.so.12 /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
ln -s /opt/intel/oneapi-tbb-2021.12.0/lib/intel64/gcc4.8/libtbbmalloc.so.2 /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 && \
|
||||
mkdir -p /etc/ld.so.conf.d && \
|
||||
echo /opt/intel/oclcpuexp_2024.17.3.0.09_rel/x64 > /etc/ld.so.conf.d/libintelopenclexp.conf && \
|
||||
ldconfig -f /etc/ld.so.conf.d/libintelopenclexp.conf && \
|
||||
cd / && \
|
||||
rm -rf /tmp/opencl-driver-intel
|
||||
|
||||
ENV NVIDIA_VISIBLE_DEVICES=all
|
||||
ENV NVIDIA_DRIVER_CAPABILITIES=graphics,utility,compute
|
||||
ENV QTWEBENGINE_DISABLE_SANDBOX=1
|
||||
|
||||
RUN dbus-uuidgen > /etc/machine-id
|
||||
|
||||
ARG USER=batman
|
||||
ARG USER_UID=1001
|
||||
RUN useradd -m -s /bin/bash -u $USER_UID $USER
|
||||
RUN usermod -aG sudo $USER
|
||||
RUN echo '%sudo ALL=(ALL) NOPASSWD:ALL' >> /etc/sudoers
|
||||
USER $USER
|
||||
|
||||
COPY --chown=$USER pyproject.toml uv.lock /home/$USER
|
||||
COPY --chown=$USER tools/install_python_dependencies.sh /home/$USER/tools/
|
||||
|
||||
ENV VIRTUAL_ENV=/home/$USER/.venv
|
||||
ENV PATH="$VIRTUAL_ENV/bin:$PATH"
|
||||
RUN cd /home/$USER && \
|
||||
tools/install_python_dependencies.sh && \
|
||||
rm -rf tools/ pyproject.toml uv.lock .cache
|
||||
|
||||
USER root
|
||||
RUN sudo git config --global --add safe.directory /tmp/openpilot
|
||||
@@ -0,0 +1,7 @@
|
||||
Copyright (c) 2018, Comma.ai, Inc.
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||
+30
@@ -0,0 +1,30 @@
|
||||
Copyright (c) 2019, Rick Lan
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, and/or sublicense,
|
||||
for non-commercial purposes only, subject to the following conditions:
|
||||
|
||||
- The above copyright notice and this permission notice shall be included in
|
||||
all copies or substantial portions of the Software.
|
||||
- Commercial use (e.g. use in a product, service, or activity intended to
|
||||
generate revenue) is prohibited without explicit written permission from
|
||||
the copyright holder.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||
|
||||
---
|
||||
Copyright (c) 2018, Comma.ai, Inc.
|
||||
|
||||
Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
of this software and associated documentation files (the "Software"), to deal
|
||||
in the Software without restriction, including without limitation the rights
|
||||
to use, copy, modify, merge, publish, distribute, sublicense,
|
||||
and/or sell copies of the Software, and to permit persons to whom the
|
||||
Software is furnished to do so, subject to the following conditions:
|
||||
|
||||
The above copyright notice and this permission notice shall be included in
|
||||
all copies or substantial portions of the Software.
|
||||
|
||||
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
|
||||
@@ -0,0 +1,74 @@
|
||||

|
||||
|
||||
[Read this in English](README_EN.md)
|
||||
|
||||
# **🐲 dragonpilot - 賦予您的愛車「龍」之魂**
|
||||
|
||||
**我們與您一同翱翔於更智慧、更貼心的駕駛旅程。**
|
||||
|
||||
## **👋 嘿, 朋友,歡迎您的到來!**
|
||||
|
||||
`dragonpilot` 誕生於 2019 年,由三位早期的 openpilot 華人玩家共同創立。初衷很簡單:為廣大的華人用戶、玩家們提供一個友善的交流環境、更簡便的設定協助,並加入更多適合在地使用的貼心功能。
|
||||
|
||||
我們深知在地化的重要性,特別是語言的親切感。因此,我們率先導入了完整的中文介面,讓 `dragonpilot` 迅速在華語地區累積了口碑,也讓華人的使用者數量在全球名列前茅。這份來自在地的支持,是我們持續前進的最大動力。
|
||||
|
||||
我們以功能強大的 [openpilot](https://github.com/commaai/openpilot) 為基礎——這套據美國消費者報告評測優於市售車方案的開源輔助駕駛系統——融入了更多在地化的巧思與客製化的溫度,希望能打造出最符合您需求的駕駛夥伴。(您也可以參考我們 repo 中保留的 [openpilot 原始說明檔案](README_OPENPILOT.md))
|
||||
|
||||
取名 `dragonpilot`,是因為我們希望它能像神話中的「龍」一樣,既強大又充滿智慧,為您的行車安全保駕護航。龍,在我們華人文化中,更是吉祥與力量的象徵,也代表著我們的根源與驕傲。
|
||||
|
||||
## **✨ dragonpilot 的里程碑**
|
||||
|
||||
我們不僅保留了 openpilot 的核心優勢,更達成了許多從社群回饋中誕生的里程碑,這些是我們引以為傲的足跡:
|
||||
|
||||
* **🚘 全時置中車道維持 (ALKA)**
|
||||
|
||||
這不只是一個功能,更是 `dragonpilot` 的哲學。我們最早於 [0.6.2 版本](https://github.com/dragonpilot-community/dragonpilot/blob/2861467183d62151024320447ba04d18fc3fe1e6/selfdrive/car/toyota/carstate.py#L199) 時便實現了這個功能,其開發歷程始於 2017 Lexus IS300h,接著擴展至 Toyota 全車系,並逐步延伸到其他支援的品牌。它能溫柔地輔助您,讓車輛始終穩定地保持在車道中央,提供一份額外的安心與從容。
|
||||
|
||||
* **🌐 率先導入多國語言介面**
|
||||
|
||||
在官方 openpilot 還未支援前,我們便已將多國語言介面實現。`dragonpilot` 完整支援繁體中文、簡體中文與英文,讓操作毫無隔閡。
|
||||
|
||||
* **💻 唯一同時支援多硬體平台**
|
||||
|
||||
我們是唯一曾致力於讓專案同時兼容 EON、comma two、comma 3 與 Jetson 平台的社群分支,這份努力是為了服務最廣大的玩家社群。
|
||||
此外,在 comma.ai 團隊於 0.10.0 版本宣布停止支持 comma 3 後,我們仍是唯一一個完整同時支援 comma 3、comma 3X 以及 O3、O3L、O3XL(O3 系列為副廠硬體)的社群分支。
|
||||
|
||||
* **📜 曾榮獲官方認證第一大分支**
|
||||
|
||||
基於活躍的社群與功能創新,`dragonpilot` 曾一度成長為 comma ai 官方認證的第一大 openpilot 分支,這份榮耀屬於每一位參與者。
|
||||
|
||||
## **🧑💻 設計理念 - 少即是多 (Less is More)**
|
||||
|
||||
隨著 openpilot 的 AI 模型日益強大,許多過去需要手動微調的功能,現在都已能透過更先進的模型來實現。因此,我們現在的開發重心回歸到 **「最小化修改」(minimal changes)** 的核心原則上。
|
||||
|
||||
我們的目標是為您提供最純粹、最接近官方的 openpilot 駕駛感受,同時保留 `dragonpilot` 那些經過時間考驗、最受社群喜愛的經典功能。我們相信,在強大的 AI 基礎上,簡潔即是力量。
|
||||
|
||||
## **🛠️ 硬件的足跡 - 一路走來的夥伴們**
|
||||
|
||||
從最早的 **EON**,到官方的 **comma two / three (C2/C3/C3X)**,再到社群中各式各樣充滿智慧的**副廠機 (如 C1.5, O2, O3, O3L, O3XL 等)**,甚至我們也曾探索過在 [**Jetson Xavier NX**](https://github.com/eFiniLan/xnxpilot) 上的可能性。
|
||||
|
||||
目前最新版本主要支援: comma3 / 3X 以及 O3 / O3L / O3XL 等社群硬體。
|
||||
針對 EON / C1.5 / C2 等舊款硬體,最後支援的版本位於 [d2 分支](https://github.com/dragonpilot-community/dragonpilot/tree/d2)。
|
||||
無論您手上是哪一款設備,都代表著您對開源駕駛輔助的一份熱情。
|
||||
|
||||
## **🫂 加入我們,成為「尋龍者」的一份子**
|
||||
|
||||
`dragonpilot` 的成長,離不開每一位使用者的貢獻與回饋。我們是一個以**公開、透明**為原則的溫暖社群,希望在這裡能與所有對 openpilot / dragonpilot 有興趣的用戶分享、交流開發與使用上的經驗。
|
||||
|
||||
[**歡迎加入我們的 Facebook 社團進行交流!**](https://www.facebook.com/groups/930190251238639)
|
||||
|
||||
## **❤️ 特別感謝**
|
||||
|
||||
`dragonpilot` 從創立至今,從未打算透過 Patreon 等平台進行任何形式的募資。我們的初衷是建立一個讓大家能一起學習、一起成長的社群。It's all about fun, not money.
|
||||
|
||||
然而,我們仍要對那些自發性支持本專案的朋友們,致上最誠摯的感謝。正是因為有您們的鼓勵,我們才有更大的動力持續前進。
|
||||
|
||||
[**我們的贊助者名單**](SPONSORS.md)
|
||||
|
||||
### **安全聲明**
|
||||
|
||||
`dragonpilot` 是一種駕駛**輔助**系統,並非全自動駕駛。它旨在減輕您的駕駛疲勞,提升行車安全,但駕駛人仍需時刻保持專注,並隨時準備接管車輛。請務必遵守您所在地區的交通法規。
|
||||
|
||||
**最後,再次感謝您的到來。**
|
||||
|
||||
**期待與您一同在智慧駕駛的道路上,乘「龍」而行!**
|
||||
@@ -0,0 +1,74 @@
|
||||

|
||||
|
||||
[Read this in Chinese](README.md)
|
||||
|
||||
# **🐲 dragonpilot - Bringing the Spirit of the Dragon to Your Car**
|
||||
|
||||
**Join us on a smarter, more thoughtful driving journey.**
|
||||
|
||||
## **👋 Welcome, friend!**
|
||||
|
||||
`dragonpilot` was launched in 2019 by three early openpilot enthusiasts from the Chinese community. Our mission was simple: create a friendly space for users to share experiences, provide easier setup help, and add features tailored for local needs.
|
||||
|
||||
Localization has always been at the heart of what we do—starting with a fully Chinese interface. This made `dragonpilot` quickly popular in Chinese-speaking regions and helped our user base grow into one of the largest worldwide. That community support is what keeps us moving forward.
|
||||
|
||||
Built on top of the powerful [openpilot](https://github.com/commaai/openpilot)—an open-source driver assistance system rated by Consumer Reports as outperforming commercial offerings—we add localized refinements and user-focused features to create a driving companion that truly fits your needs. (You can also see the [original openpilot README](README_OPENPILOT.md) preserved in our repo.)
|
||||
|
||||
The name `dragonpilot` reflects our vision: like the dragon of mythology, it is strong and wise, guarding your safety on the road. In Chinese culture, the dragon is also a symbol of luck and strength, representing our roots and pride.
|
||||
|
||||
## **✨ Milestones**
|
||||
|
||||
Beyond carrying forward openpilot's core strengths, we've reached several milestones inspired by community feedback:
|
||||
|
||||
* **🚘 Always Lane Keep Assist (ALKA)**
|
||||
|
||||
More than a feature—it's part of the `dragonpilot` philosophy. Introduced as early as [version 0.6.2](https://github.com/dragonpilot-community/dragonpilot/blob/2861467183d62151024320447ba04d18fc3fe1e6/selfdrive/car/toyota/carstate.py#L199), first tested on a 2017 Lexus IS300h, then expanded to Toyota's lineup and beyond. ALKA helps keep your vehicle steadily centered, giving you extra confidence on the road.
|
||||
|
||||
* **🌐 First to add multilingual support**
|
||||
|
||||
Before openpilot officially supported it, we had already introduced multiple languages. `dragonpilot` fully supports Traditional Chinese, Simplified Chinese, and English.
|
||||
|
||||
* **💻 Only community fork to support multiple hardware platforms at once**
|
||||
|
||||
We uniquely worked to make the project run on EON, comma two, comma 3, and Jetson—serving the widest range of users possible.
|
||||
Additionally, after the comma.ai team deprecated the comma 3 in version 0.10.0, we remain the only community fork to offer full, simultaneous support for the comma 3, comma 3X, and the O3, O3L, and O3XL (the O3 series being third-party hardware).
|
||||
|
||||
* **📜 Once recognized as the #1 openpilot fork**
|
||||
|
||||
Thanks to an active community and continuous innovation, `dragonpilot` was once the largest openpilot fork officially recognized by comma ai. This honor belongs to everyone who contributed.
|
||||
|
||||
## **🧑💻 Design Philosophy - Less is More**
|
||||
|
||||
As openpilot's AI grows stronger, many features that once required manual tuning are now handled by advanced models. That's why our focus has returned to **“minimal changes.”**
|
||||
|
||||
We aim to give you the purest, most official-like openpilot driving experience—while preserving `dragonpilot`'s classic, community-loved features. With a solid AI foundation, simplicity is strength.
|
||||
|
||||
## **🛠️ Hardware Journey**
|
||||
|
||||
From the early **EON**, to official devices like **comma two / three (C2/C3/C3X)**, to creative community builds (**C1.5, O2, O3, O3L, O3XL, etc.**), and even experiments with [**Jetson Xavier NX**](https://github.com/eFiniLan/xnxpilot).
|
||||
|
||||
Currently, the latest versions support: **comma3 / 3X** and community hardware like **O3 / O3L / O3XL**.
|
||||
Older devices such as **EON / C1.5 / C2** are supported in the [d2 branch](https://github.com/dragonpilot-community/dragonpilot/tree/d2).
|
||||
Whatever device you're on, it represents your passion for open-source driver assistance.
|
||||
|
||||
## **🫂 Join Us – Become a “Dragon Seeker”**
|
||||
|
||||
`dragonpilot` thrives thanks to every user's contributions and feedback. We're an open, transparent, and welcoming community where enthusiasts can share experiences with openpilot and `dragonpilot`.
|
||||
|
||||
[**Join our Facebook group here!**](https://www.facebook.com/groups/930190251238639)
|
||||
|
||||
## **❤️ Special Thanks**
|
||||
|
||||
Since day one, `dragonpilot` has never asked for funding through Patreon or similar platforms. Our vision is a community where everyone learns and grows together. It's about fun, not money.
|
||||
|
||||
That said, we're deeply grateful to those who voluntarily supported the project. Your encouragement keeps us motivated to keep building.
|
||||
|
||||
[**See our sponsors**](SPONSORS.md)
|
||||
|
||||
### **Safety Notice**
|
||||
|
||||
`dragonpilot` is a driver **assistance** system, not full self-driving. It reduces fatigue and improves safety, but you must remain alert and ready to take control at all times. Always follow your local traffic laws.
|
||||
|
||||
**Thanks again for being here.**
|
||||
|
||||
**We look forward to riding the “dragon” with you on the road to smarter driving!**
|
||||
@@ -0,0 +1,107 @@
|
||||
<div align="center" style="text-align: center;">
|
||||
|
||||
<h1>openpilot</h1>
|
||||
|
||||
<p>
|
||||
<b>openpilot is an operating system for robotics.</b>
|
||||
<br>
|
||||
Currently, it upgrades the driver assistance system in 300+ supported cars.
|
||||
</p>
|
||||
|
||||
<h3>
|
||||
<a href="https://docs.comma.ai">Docs</a>
|
||||
<span> · </span>
|
||||
<a href="https://docs.comma.ai/contributing/roadmap/">Roadmap</a>
|
||||
<span> · </span>
|
||||
<a href="https://github.com/commaai/openpilot/blob/master/docs/CONTRIBUTING.md">Contribute</a>
|
||||
<span> · </span>
|
||||
<a href="https://discord.comma.ai">Community</a>
|
||||
<span> · </span>
|
||||
<a href="https://comma.ai/shop">Try it on a comma 3X</a>
|
||||
</h3>
|
||||
|
||||
Quick start: `bash <(curl -fsSL openpilot.comma.ai)`
|
||||
|
||||
[](https://github.com/commaai/openpilot/actions/workflows/tests.yaml)
|
||||
[](LICENSE)
|
||||
[](https://x.com/comma_ai)
|
||||
[](https://discord.comma.ai)
|
||||
|
||||
</div>
|
||||
|
||||
<table>
|
||||
<tr>
|
||||
<td><a href="https://youtu.be/NmBfgOanCyk" title="Video By Greer Viau"><img src="https://github.com/commaai/openpilot/assets/8762862/2f7112ae-f748-4f39-b617-fabd689c3772"></a></td>
|
||||
<td><a href="https://youtu.be/VHKyqZ7t8Gw" title="Video By Logan LeGrand"><img src="https://github.com/commaai/openpilot/assets/8762862/92351544-2833-40d7-9e0b-7ef7ae37ec4c"></a></td>
|
||||
<td><a href="https://youtu.be/SUIZYzxtMQs" title="A drive to Taco Bell"><img src="https://github.com/commaai/openpilot/assets/8762862/05ceefc5-2628-439c-a9b2-89ce77dc6f63"></a></td>
|
||||
</tr>
|
||||
</table>
|
||||
|
||||
|
||||
Using openpilot in a car
|
||||
------
|
||||
|
||||
To use openpilot in a car, you need four things:
|
||||
1. **Supported Device:** a comma 3X, available at [comma.ai/shop](https://comma.ai/shop/comma-3x).
|
||||
2. **Software:** The setup procedure for the comma 3X allows users to enter a URL for custom software. Use the URL `openpilot.comma.ai` to install the release version.
|
||||
3. **Supported Car:** Ensure that you have one of [the 275+ supported cars](docs/CARS.md).
|
||||
4. **Car Harness:** You will also need a [car harness](https://comma.ai/shop/car-harness) to connect your comma 3X to your car.
|
||||
|
||||
We have detailed instructions for [how to install the harness and device in a car](https://comma.ai/setup). Note that it's possible to run openpilot on [other hardware](https://blog.comma.ai/self-driving-car-for-free/), although it's not plug-and-play.
|
||||
|
||||
### Branches
|
||||
| branch | URL | description |
|
||||
|------------------|----------------------------------------|-------------------------------------------------------------------------------------|
|
||||
| `release3` | openpilot.comma.ai | This is openpilot's release branch. |
|
||||
| `release3-staging` | openpilot-test.comma.ai | This is the staging branch for releases. Use it to get new releases slightly early. |
|
||||
| `nightly` | openpilot-nightly.comma.ai | This is the bleeding edge development branch. Do not expect this to be stable. |
|
||||
| `nightly-dev` | installer.comma.ai/commaai/nightly-dev | Same as nightly, but includes experimental development features for some cars. |
|
||||
|
||||
To start developing openpilot
|
||||
------
|
||||
|
||||
openpilot is developed by [comma](https://comma.ai/) and by users like you. We welcome both pull requests and issues on [GitHub](http://github.com/commaai/openpilot).
|
||||
|
||||
* Join the [community Discord](https://discord.comma.ai)
|
||||
* Check out [the contributing docs](docs/CONTRIBUTING.md)
|
||||
* Check out the [openpilot tools](tools/)
|
||||
* Code documentation lives at https://docs.comma.ai
|
||||
* Information about running openpilot lives on the [community wiki](https://github.com/commaai/openpilot/wiki)
|
||||
|
||||
Want to get paid to work on openpilot? [comma is hiring](https://comma.ai/jobs#open-positions) and offers lots of [bounties](https://comma.ai/bounties) for external contributors.
|
||||
|
||||
Safety and Testing
|
||||
----
|
||||
|
||||
* openpilot observes [ISO26262](https://en.wikipedia.org/wiki/ISO_26262) guidelines, see [SAFETY.md](docs/SAFETY.md) for more details.
|
||||
* openpilot has software-in-the-loop [tests](.github/workflows/tests.yaml) that run on every commit.
|
||||
* The code enforcing the safety model lives in panda and is written in C, see [code rigor](https://github.com/commaai/panda#code-rigor) for more details.
|
||||
* panda has software-in-the-loop [safety tests](https://github.com/commaai/panda/tree/master/tests/safety).
|
||||
* Internally, we have a hardware-in-the-loop Jenkins test suite that builds and unit tests the various processes.
|
||||
* panda has additional hardware-in-the-loop [tests](https://github.com/commaai/panda/blob/master/Jenkinsfile).
|
||||
* We run the latest openpilot in a testing closet containing 10 comma devices continuously replaying routes.
|
||||
|
||||
<details>
|
||||
<summary>MIT Licensed</summary>
|
||||
|
||||
openpilot is released under the MIT license. Some parts of the software are released under other licenses as specified.
|
||||
|
||||
Any user of this software shall indemnify and hold harmless Comma.ai, Inc. and its directors, officers, employees, agents, stockholders, affiliates, subcontractors and customers from and against all allegations, claims, actions, suits, demands, damages, liabilities, obligations, losses, settlements, judgments, costs and expenses (including without limitation attorneys’ fees and costs) which arise out of, relate to or result from any use of this software by user.
|
||||
|
||||
**THIS IS ALPHA QUALITY SOFTWARE FOR RESEARCH PURPOSES ONLY. THIS IS NOT A PRODUCT.
|
||||
YOU ARE RESPONSIBLE FOR COMPLYING WITH LOCAL LAWS AND REGULATIONS.
|
||||
NO WARRANTY EXPRESSED OR IMPLIED.**
|
||||
</details>
|
||||
|
||||
<details>
|
||||
<summary>User Data and comma Account</summary>
|
||||
|
||||
By default, openpilot uploads the driving data to our servers. You can also access your data through [comma connect](https://connect.comma.ai/). We use your data to train better models and improve openpilot for everyone.
|
||||
|
||||
openpilot is open source software: the user is free to disable data collection if they wish to do so.
|
||||
|
||||
openpilot logs the road-facing cameras, CAN, GPS, IMU, magnetometer, thermal sensors, crashes, and operating system logs.
|
||||
The driver-facing camera and microphone are only logged if you explicitly opt-in in settings.
|
||||
|
||||
By using openpilot, you agree to [our Privacy Policy](https://comma.ai/privacy). You understand that use of this software or its related services will generate certain types of user data, which may be logged and stored at the sole discretion of comma. By accepting this agreement, you grant an irrevocable, perpetual, worldwide right to comma for the use of this data.
|
||||
</details>
|
||||
+1092
File diff suppressed because it is too large
Load Diff
+224
@@ -0,0 +1,224 @@
|
||||
import os
|
||||
import subprocess
|
||||
import sys
|
||||
import sysconfig
|
||||
import platform
|
||||
import shlex
|
||||
import numpy as np
|
||||
|
||||
import SCons.Errors
|
||||
|
||||
SCons.Warnings.warningAsException(True)
|
||||
|
||||
Decider('MD5-timestamp')
|
||||
|
||||
SetOption('num_jobs', max(1, int(os.cpu_count()/2)))
|
||||
|
||||
AddOption('--kaitai', action='store_true', help='Regenerate kaitai struct parsers')
|
||||
AddOption('--asan', action='store_true', help='turn on ASAN')
|
||||
AddOption('--ubsan', action='store_true', help='turn on UBSan')
|
||||
AddOption('--mutation', action='store_true', help='generate mutation-ready code')
|
||||
AddOption('--ccflags', action='store', type='string', default='', help='pass arbitrary flags over the command line')
|
||||
AddOption('--minimal',
|
||||
action='store_false',
|
||||
dest='extras',
|
||||
default=os.path.exists(File('#.gitattributes').abspath), # minimal by default on release branch (where there's no LFS)
|
||||
help='the minimum build to run openpilot. no tests, tools, etc.')
|
||||
|
||||
# Detect platform
|
||||
arch = subprocess.check_output(["uname", "-m"], encoding='utf8').rstrip()
|
||||
if platform.system() == "Darwin":
|
||||
arch = "Darwin"
|
||||
brew_prefix = subprocess.check_output(['brew', '--prefix'], encoding='utf8').strip()
|
||||
elif arch == "aarch64" and os.path.isfile('/TICI'):
|
||||
arch = "larch64"
|
||||
assert arch in [
|
||||
"larch64", # linux tici arm64
|
||||
"aarch64", # linux pc arm64
|
||||
"x86_64", # linux pc x64
|
||||
"Darwin", # macOS arm64 (x86 not supported)
|
||||
]
|
||||
|
||||
env = Environment(
|
||||
ENV={
|
||||
"PATH": os.environ['PATH'],
|
||||
"PYTHONPATH": Dir("#").abspath + ':' + Dir(f"#third_party/acados").abspath,
|
||||
"ACADOS_SOURCE_DIR": Dir("#third_party/acados").abspath,
|
||||
"ACADOS_PYTHON_INTERFACE_PATH": Dir("#third_party/acados/acados_template").abspath,
|
||||
"TERA_PATH": Dir("#").abspath + f"/third_party/acados/{arch}/t_renderer"
|
||||
},
|
||||
CC='clang',
|
||||
CXX='clang++',
|
||||
CCFLAGS=[
|
||||
"-g",
|
||||
"-fPIC",
|
||||
"-O2",
|
||||
"-Wunused",
|
||||
"-Werror",
|
||||
"-Wshadow",
|
||||
"-Wno-unknown-warning-option",
|
||||
"-Wno-inconsistent-missing-override",
|
||||
"-Wno-c99-designator",
|
||||
"-Wno-reorder-init-list",
|
||||
"-Wno-vla-cxx-extension",
|
||||
],
|
||||
CFLAGS=["-std=gnu11"],
|
||||
CXXFLAGS=["-std=c++1z"],
|
||||
CPPPATH=[
|
||||
"#",
|
||||
"#msgq",
|
||||
"#third_party",
|
||||
"#third_party/json11",
|
||||
"#third_party/linux/include",
|
||||
"#third_party/acados/include",
|
||||
"#third_party/acados/include/blasfeo/include",
|
||||
"#third_party/acados/include/hpipm/include",
|
||||
"#third_party/catch2/include",
|
||||
"#third_party/libyuv/include",
|
||||
],
|
||||
LIBPATH=[
|
||||
"#common",
|
||||
"#msgq_repo",
|
||||
"#third_party",
|
||||
"#selfdrive/pandad",
|
||||
"#rednose/helpers",
|
||||
f"#third_party/libyuv/{arch}/lib",
|
||||
f"#third_party/acados/{arch}/lib",
|
||||
],
|
||||
RPATH=[],
|
||||
CYTHONCFILESUFFIX=".cpp",
|
||||
COMPILATIONDB_USE_ABSPATH=True,
|
||||
REDNOSE_ROOT="#",
|
||||
tools=["default", "cython", "compilation_db", "rednose_filter"],
|
||||
toolpath=["#site_scons/site_tools", "#rednose_repo/site_scons/site_tools"],
|
||||
)
|
||||
|
||||
# Arch-specific flags and paths
|
||||
if arch == "larch64":
|
||||
env.Append(CPPPATH=["#third_party/opencl/include"])
|
||||
env.Append(LIBPATH=[
|
||||
"/usr/local/lib",
|
||||
"/system/vendor/lib64",
|
||||
"/usr/lib/aarch64-linux-gnu",
|
||||
])
|
||||
arch_flags = ["-D__TICI__", "-mcpu=cortex-a57"]
|
||||
env.Append(CCFLAGS=arch_flags)
|
||||
env.Append(CXXFLAGS=arch_flags)
|
||||
elif arch == "Darwin":
|
||||
env.Append(LIBPATH=[
|
||||
f"{brew_prefix}/lib",
|
||||
f"{brew_prefix}/opt/openssl@3.0/lib",
|
||||
f"{brew_prefix}/opt/llvm/lib/c++",
|
||||
"/System/Library/Frameworks/OpenGL.framework/Libraries",
|
||||
])
|
||||
env.Append(CCFLAGS=["-DGL_SILENCE_DEPRECATION"])
|
||||
env.Append(CXXFLAGS=["-DGL_SILENCE_DEPRECATION"])
|
||||
env.Append(CPPPATH=[
|
||||
f"{brew_prefix}/include",
|
||||
f"{brew_prefix}/opt/openssl@3.0/include",
|
||||
])
|
||||
else:
|
||||
env.Append(LIBPATH=[
|
||||
"/usr/lib",
|
||||
"/usr/local/lib",
|
||||
])
|
||||
|
||||
# Sanitizers and extra CCFLAGS from CLI
|
||||
if GetOption('asan'):
|
||||
env.Append(CCFLAGS=["-fsanitize=address", "-fno-omit-frame-pointer"])
|
||||
env.Append(LINKFLAGS=["-fsanitize=address"])
|
||||
elif GetOption('ubsan'):
|
||||
env.Append(CCFLAGS=["-fsanitize=undefined"])
|
||||
env.Append(LINKFLAGS=["-fsanitize=undefined"])
|
||||
|
||||
_extra_cc = shlex.split(GetOption('ccflags') or '')
|
||||
if _extra_cc:
|
||||
env.Append(CCFLAGS=_extra_cc)
|
||||
|
||||
# no --as-needed on mac linker
|
||||
if arch != "Darwin":
|
||||
env.Append(LINKFLAGS=["-Wl,--as-needed", "-Wl,--no-undefined"])
|
||||
|
||||
# progress output
|
||||
node_interval = 5
|
||||
node_count = 0
|
||||
def progress_function(node):
|
||||
global node_count
|
||||
node_count += node_interval
|
||||
sys.stderr.write("progress: %d\n" % node_count)
|
||||
if os.environ.get('SCONS_PROGRESS'):
|
||||
Progress(progress_function, interval=node_interval)
|
||||
|
||||
# ********** Cython build environment **********
|
||||
py_include = sysconfig.get_paths()['include']
|
||||
envCython = env.Clone()
|
||||
envCython["CPPPATH"] += [py_include, np.get_include()]
|
||||
envCython["CCFLAGS"] += ["-Wno-#warnings", "-Wno-shadow", "-Wno-deprecated-declarations"]
|
||||
envCython["CCFLAGS"].remove("-Werror")
|
||||
|
||||
envCython["LIBS"] = []
|
||||
if arch == "Darwin":
|
||||
envCython["LINKFLAGS"] = env["LINKFLAGS"] + ["-bundle", "-undefined", "dynamic_lookup"]
|
||||
else:
|
||||
envCython["LINKFLAGS"] = ["-pthread", "-shared"]
|
||||
|
||||
np_version = SCons.Script.Value(np.__version__)
|
||||
Export('envCython', 'np_version')
|
||||
|
||||
Export('env', 'arch')
|
||||
|
||||
# Setup cache dir
|
||||
cache_dir = '/data/scons_cache' if arch == "larch64" else '/tmp/scons_cache'
|
||||
CacheDir(cache_dir)
|
||||
Clean(["."], cache_dir)
|
||||
|
||||
# ********** start building stuff **********
|
||||
|
||||
# Build common module
|
||||
SConscript(['common/SConscript'])
|
||||
Import('_common')
|
||||
common = [_common, 'json11', 'zmq']
|
||||
Export('common')
|
||||
|
||||
# Build messaging (cereal + msgq + socketmaster + their dependencies)
|
||||
# Enable swaglog include in submodules
|
||||
env_swaglog = env.Clone()
|
||||
env_swaglog['CXXFLAGS'].append('-DSWAGLOG="\\"common/swaglog.h\\""')
|
||||
SConscript(['msgq_repo/SConscript'], exports={'env': env_swaglog})
|
||||
SConscript(['opendbc_repo/SConscript'], exports={'env': env_swaglog})
|
||||
|
||||
SConscript(['cereal/SConscript'])
|
||||
|
||||
Import('socketmaster', 'msgq')
|
||||
messaging = [socketmaster, msgq, 'capnp', 'kj',]
|
||||
Export('messaging')
|
||||
|
||||
|
||||
# Build other submodules
|
||||
SConscript(['panda/SConscript'])
|
||||
SConscript(['panda_tici/SConscript'])
|
||||
|
||||
# Build rednose library
|
||||
SConscript(['rednose/SConscript'])
|
||||
|
||||
# Build system services
|
||||
SConscript([
|
||||
'system/ubloxd/SConscript',
|
||||
'system/loggerd/SConscript',
|
||||
])
|
||||
|
||||
if arch == "larch64":
|
||||
SConscript(['system/camerad/SConscript'])
|
||||
|
||||
# Build openpilot
|
||||
SConscript(['third_party/SConscript'])
|
||||
|
||||
SConscript(['selfdrive/SConscript'])
|
||||
|
||||
if Dir('#tools/cabana/').exists() and GetOption('extras'):
|
||||
SConscript(['tools/replay/SConscript'])
|
||||
if arch != "larch64":
|
||||
SConscript(['tools/cabana/SConscript'])
|
||||
|
||||
|
||||
env.CompilationDatabase('compile_commands.json')
|
||||
@@ -0,0 +1,5 @@
|
||||
# Security Policy
|
||||
|
||||
## Reporting a Vulnerability
|
||||
|
||||
Suspected vulnerabilities can be reported to both `adeeb@comma.ai` and `security@comma.ai`.
|
||||
+26
@@ -0,0 +1,26 @@
|
||||
# Sponsors 贊助者
|
||||
|
||||
我們誠摯感謝以下贊助者提供的硬體資源,讓專案能夠在多種平台上進行測試與驗證。
|
||||
|
||||
We sincerely thank the following sponsors for providing hardware resources, which enable the project to be tested and validated across multiple platforms.
|
||||
|
||||
---
|
||||
|
||||
## 贊助者列表 Sponsors
|
||||
|
||||
| 贊助者 Sponsor | 設備 Deices | 備註 Notes |
|
||||
| -------------- | ----------- | ---------- |
|
||||
| BlueGood | <ul><li>Radar Filter x 2</li><li>sDSU x1</li></ul> | - |
|
||||
| Chia Chun Lee | <ul><li>C3 Quick Mount x1</li></ul> | - |
|
||||
| CloudJ | <ul><li>C3X x1</li></ul> | - |
|
||||
| FareWay | <ul><li>EON Quick Mount x1</li><li>C2/C3 Quick Mount x1</li></ul> | Special thanks for fixing my good old EON |
|
||||
| Fred Wang | <ul><li>Oneplus 3t x1</li></ul> | - |
|
||||
| Saber Huang | <ul><li>O3L x1</li></ul> | - |
|
||||
| [馬威 Mr. One](https://shop61532546.taobao.com/) | <ul><li>O3 x 1</li><li>O3 (Dev) x1</li><li>O3XL x1</li><li>Red Panda x1</li><li>Panda Jungle v1 x1</li></ul> | - |
|
||||
| 門文梁 | <ul><li>C1.5 x1</li></ul> | - |
|
||||
|
||||
---
|
||||
|
||||
🙏 沒有你們的支持,我們無法讓專案在這麼多硬體平台上持續成長與驗證。
|
||||
|
||||
Without your support, this project could not continue to grow and be validated across so many hardware platforms.
|
||||
@@ -0,0 +1,95 @@
|
||||
# What is cereal?
|
||||
|
||||
cereal is the messaging system for openpilot. It uses [msgq](https://github.com/commaai/msgq) as a pub/sub backend, and [Cap'n proto](https://capnproto.org/capnp-tool.html) for serialization of the structs.
|
||||
|
||||
|
||||
## Messaging Spec
|
||||
|
||||
You'll find the message types in [log.capnp](log.capnp). It uses [Cap'n proto](https://capnproto.org/capnp-tool.html) and defines one struct called `Event`.
|
||||
|
||||
All `Events` have a `logMonoTime` and a `valid`. Then a big union defines the packet type.
|
||||
|
||||
### Best Practices
|
||||
|
||||
- **All fields must describe quantities in SI units**, unless otherwise specified in the field name.
|
||||
- In the context of the message they are in, field names should be completely unambiguous.
|
||||
- All values should be easy to plot and be human-readable with minimal parsing.
|
||||
|
||||
### Maintaining backwards-compatibility
|
||||
|
||||
When making changes to the messaging spec you want to maintain backwards-compatibility, such that old logs can
|
||||
be parsed with a new version of cereal. Adding structs and adding members to structs is generally safe, most other
|
||||
things are not. Read more details [here](https://capnproto.org/language.html).
|
||||
|
||||
### Custom forks
|
||||
|
||||
Forks of [openpilot](https://github.com/commaai/openpilot) might want to add things to the messaging
|
||||
spec, however this could conflict with future changes made in mainline cereal/openpilot. Rebasing against mainline openpilot
|
||||
then means breaking backwards-compatibility with all old logs of your fork. So we added reserved events in
|
||||
[custom.capnp](custom.capnp) that we will leave empty in mainline cereal/openpilot. **If you only modify those, you can ensure your
|
||||
fork will remain backwards-compatible with all versions of mainline openpilot and your fork.**
|
||||
|
||||
An example of compatible changes:
|
||||
```diff
|
||||
diff --git a/cereal/custom.capnp b/cereal/custom.capnp
|
||||
index 3348e859e..3365c7b98 100644
|
||||
--- a/cereal/custom.capnp
|
||||
+++ b/cereal/custom.capnp
|
||||
@@ -10,7 +10,11 @@ $Cxx.namespace("cereal");
|
||||
# DO rename the structs
|
||||
# DON'T change the identifier (e.g. @0x81c2f05a394cf4af)
|
||||
|
||||
-struct CustomReserved0 @0x81c2f05a394cf4af {
|
||||
+struct SteeringInfo @0x81c2f05a394cf4af {
|
||||
+ active @0 :Bool;
|
||||
+ steeringAngleDeg @1 :Float32;
|
||||
+ steeringRateDeg @2 :Float32;
|
||||
+ steeringAccelDeg @3 :Float32;
|
||||
}
|
||||
|
||||
struct CustomReserved1 @0xaedffd8f31e7b55d {
|
||||
diff --git a/cereal/log.capnp b/cereal/log.capnp
|
||||
index 1209f3fd9..b189f58b6 100644
|
||||
--- a/cereal/log.capnp
|
||||
+++ b/cereal/log.capnp
|
||||
@@ -2558,14 +2558,14 @@ struct Event {
|
||||
|
||||
# DO change the name of the field
|
||||
# DON'T change anything after the "@"
|
||||
- customReservedRawData0 @124 :Data;
|
||||
+ rawCanData @124 :Data;
|
||||
customReservedRawData1 @125 :Data;
|
||||
customReservedRawData2 @126 :Data;
|
||||
|
||||
# DO change the name of the field and struct
|
||||
# DON'T change the ID (e.g. @107)
|
||||
# DON'T change which struct it points to
|
||||
- customReserved0 @107 :Custom.CustomReserved0;
|
||||
+ steeringInfo @107 :Custom.SteeringInfo;
|
||||
customReserved1 @108 :Custom.CustomReserved1;
|
||||
customReserved2 @109 :Custom.CustomReserved2;
|
||||
customReserved3 @110 :Custom.CustomReserved3;
|
||||
```
|
||||
|
||||
---
|
||||
|
||||
Example
|
||||
---
|
||||
```python
|
||||
import cereal.messaging as messaging
|
||||
|
||||
# in subscriber
|
||||
sm = messaging.SubMaster(['sensorEvents'])
|
||||
while 1:
|
||||
sm.update()
|
||||
print(sm['sensorEvents'])
|
||||
|
||||
```
|
||||
|
||||
```python
|
||||
# in publisher
|
||||
pm = messaging.PubMaster(['sensorEvents'])
|
||||
dat = messaging.new_message('sensorEvents', size=1)
|
||||
dat.sensorEvents[0] = {"gyro": {"v": [0.1, -0.1, 0.1]}}
|
||||
pm.send('sensorEvents', dat)
|
||||
```
|
||||
@@ -0,0 +1,20 @@
|
||||
Import('env', 'common', 'msgq')
|
||||
|
||||
cereal_dir = Dir('.')
|
||||
gen_dir = Dir('gen')
|
||||
|
||||
# Build cereal
|
||||
schema_files = ['log.capnp', 'car.capnp', 'legacy.capnp', 'custom.capnp']
|
||||
env.Command([f'gen/cpp/{s}.c++' for s in schema_files] + [f'gen/cpp/{s}.h' for s in schema_files],
|
||||
schema_files,
|
||||
f"capnpc --src-prefix={cereal_dir.path} $SOURCES -o c++:{gen_dir.path}/cpp/")
|
||||
|
||||
cereal = env.Library('cereal', [f'gen/cpp/{s}.c++' for s in schema_files])
|
||||
|
||||
# Build messaging
|
||||
services_h = env.Command(['services.h'], ['services.py'], 'python3 ' + cereal_dir.path + '/services.py > $TARGET')
|
||||
env.Program('messaging/bridge', ['messaging/bridge.cc', 'messaging/msgq_to_zmq.cc'], LIBS=[msgq, common, 'pthread'])
|
||||
|
||||
socketmaster = env.Library('socketmaster', ['messaging/socketmaster.cc'])
|
||||
|
||||
Export('cereal', 'socketmaster')
|
||||
@@ -0,0 +1,11 @@
|
||||
import os
|
||||
import capnp
|
||||
from importlib.resources import as_file, files
|
||||
|
||||
capnp.remove_import_hook()
|
||||
|
||||
with as_file(files("cereal")) as fspath:
|
||||
CEREAL_PATH = fspath.as_posix()
|
||||
log = capnp.load(os.path.join(CEREAL_PATH, "log.capnp"))
|
||||
car = capnp.load(os.path.join(CEREAL_PATH, "car.capnp"))
|
||||
custom = capnp.load(os.path.join(CEREAL_PATH, "custom.capnp"))
|
||||
Symlink
+1
@@ -0,0 +1 @@
|
||||
../opendbc_repo/opendbc/car/car.capnp
|
||||
@@ -0,0 +1,74 @@
|
||||
using Cxx = import "./include/c++.capnp";
|
||||
$Cxx.namespace("cereal");
|
||||
|
||||
@0xb526ba661d550a59;
|
||||
|
||||
# custom.capnp: a home for empty structs reserved for custom forks
|
||||
# These structs are guaranteed to remain reserved and empty in mainline
|
||||
# cereal, so use these if you want custom events in your fork.
|
||||
|
||||
# DO rename the structs
|
||||
# DON'T change the identifier (e.g. @0x81c2f05a394cf4af)
|
||||
|
||||
struct DpControlsState @0x81c2f05a394cf4af {
|
||||
alkaActive @0 :Bool;
|
||||
}
|
||||
|
||||
struct ModelExt @0xaedffd8f31e7b55d {
|
||||
leftEdgeDetected @0 :Bool;
|
||||
rightEdgeDetected @1 :Bool;
|
||||
}
|
||||
|
||||
struct CustomReserved2 @0xf35cc4560bbf6ec2 {
|
||||
}
|
||||
|
||||
struct CustomReserved3 @0xda96579883444c35 {
|
||||
}
|
||||
|
||||
struct CustomReserved4 @0x80ae746ee2596b11 {
|
||||
}
|
||||
|
||||
struct CustomReserved5 @0xa5cd762cd951a455 {
|
||||
}
|
||||
|
||||
struct CustomReserved6 @0xf98d843bfd7004a3 {
|
||||
}
|
||||
|
||||
struct CustomReserved7 @0xb86e6369214c01c8 {
|
||||
}
|
||||
|
||||
struct CustomReserved8 @0xf416ec09499d9d19 {
|
||||
}
|
||||
|
||||
struct CustomReserved9 @0xa1680744031fdb2d {
|
||||
}
|
||||
|
||||
struct CustomReserved10 @0xcb9fd56c7057593a {
|
||||
}
|
||||
|
||||
struct CustomReserved11 @0xc2243c65e0340384 {
|
||||
}
|
||||
|
||||
struct CustomReserved12 @0x9ccdc8676701b412 {
|
||||
}
|
||||
|
||||
struct CustomReserved13 @0xcd96dafb67a082d0 {
|
||||
}
|
||||
|
||||
struct CustomReserved14 @0xb057204d7deadf3f {
|
||||
}
|
||||
|
||||
struct CustomReserved15 @0xbd443b539493bc68 {
|
||||
}
|
||||
|
||||
struct CustomReserved16 @0xfc6241ed8877b611 {
|
||||
}
|
||||
|
||||
struct CustomReserved17 @0xa30662f84033036c {
|
||||
}
|
||||
|
||||
struct CustomReserved18 @0xc86a3d38d13eb3ef {
|
||||
}
|
||||
|
||||
struct CustomReserved19 @0xa4f1eb3323f5f582 {
|
||||
}
|
||||
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,832 @@
|
||||
// Generated by Cap'n Proto compiler, DO NOT EDIT
|
||||
// source: custom.capnp
|
||||
|
||||
#include "custom.capnp.h"
|
||||
|
||||
namespace capnp {
|
||||
namespace schemas {
|
||||
static const ::capnp::_::AlignedData<34> b_81c2f05a394cf4af = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
175, 244, 76, 57, 90, 240, 194, 129,
|
||||
13, 0, 0, 0, 1, 0, 1, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
29, 0, 0, 0, 63, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 68, 112, 67,
|
||||
111, 110, 116, 114, 111, 108, 115, 83,
|
||||
116, 97, 116, 101, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0,
|
||||
4, 0, 0, 0, 3, 0, 4, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 1, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
13, 0, 0, 0, 90, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
12, 0, 0, 0, 3, 0, 1, 0,
|
||||
24, 0, 0, 0, 2, 0, 1, 0,
|
||||
97, 108, 107, 97, 65, 99, 116, 105,
|
||||
118, 101, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_81c2f05a394cf4af = b_81c2f05a394cf4af.words;
|
||||
#if !CAPNP_LITE
|
||||
static const uint16_t m_81c2f05a394cf4af[] = {0};
|
||||
static const uint16_t i_81c2f05a394cf4af[] = {0};
|
||||
const ::capnp::_::RawSchema s_81c2f05a394cf4af = {
|
||||
0x81c2f05a394cf4af, b_81c2f05a394cf4af.words, 34, nullptr, m_81c2f05a394cf4af,
|
||||
0, 1, i_81c2f05a394cf4af, nullptr, nullptr, { &s_81c2f05a394cf4af, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<51> b_aedffd8f31e7b55d = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
93, 181, 231, 49, 143, 253, 223, 174,
|
||||
13, 0, 0, 0, 1, 0, 1, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 178, 0, 0, 0,
|
||||
29, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
25, 0, 0, 0, 119, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 77, 111, 100,
|
||||
101, 108, 69, 120, 116, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0,
|
||||
8, 0, 0, 0, 3, 0, 4, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 1, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
41, 0, 0, 0, 138, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
44, 0, 0, 0, 3, 0, 1, 0,
|
||||
56, 0, 0, 0, 2, 0, 1, 0,
|
||||
1, 0, 0, 0, 1, 0, 0, 0,
|
||||
0, 0, 1, 0, 1, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
53, 0, 0, 0, 146, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
56, 0, 0, 0, 3, 0, 1, 0,
|
||||
68, 0, 0, 0, 2, 0, 1, 0,
|
||||
108, 101, 102, 116, 69, 100, 103, 101,
|
||||
68, 101, 116, 101, 99, 116, 101, 100,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
114, 105, 103, 104, 116, 69, 100, 103,
|
||||
101, 68, 101, 116, 101, 99, 116, 101,
|
||||
100, 0, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
1, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_aedffd8f31e7b55d = b_aedffd8f31e7b55d.words;
|
||||
#if !CAPNP_LITE
|
||||
static const uint16_t m_aedffd8f31e7b55d[] = {0, 1};
|
||||
static const uint16_t i_aedffd8f31e7b55d[] = {0, 1};
|
||||
const ::capnp::_::RawSchema s_aedffd8f31e7b55d = {
|
||||
0xaedffd8f31e7b55d, b_aedffd8f31e7b55d.words, 51, nullptr, m_aedffd8f31e7b55d,
|
||||
0, 2, i_aedffd8f31e7b55d, nullptr, nullptr, { &s_aedffd8f31e7b55d, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_f35cc4560bbf6ec2 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
194, 110, 191, 11, 86, 196, 92, 243,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 50, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_f35cc4560bbf6ec2 = b_f35cc4560bbf6ec2.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_f35cc4560bbf6ec2 = {
|
||||
0xf35cc4560bbf6ec2, b_f35cc4560bbf6ec2.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_f35cc4560bbf6ec2, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_da96579883444c35 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
53, 76, 68, 131, 152, 87, 150, 218,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 51, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_da96579883444c35 = b_da96579883444c35.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_da96579883444c35 = {
|
||||
0xda96579883444c35, b_da96579883444c35.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_da96579883444c35, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_80ae746ee2596b11 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
17, 107, 89, 226, 110, 116, 174, 128,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 52, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_80ae746ee2596b11 = b_80ae746ee2596b11.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_80ae746ee2596b11 = {
|
||||
0x80ae746ee2596b11, b_80ae746ee2596b11.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_80ae746ee2596b11, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_a5cd762cd951a455 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
85, 164, 81, 217, 44, 118, 205, 165,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 53, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_a5cd762cd951a455 = b_a5cd762cd951a455.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_a5cd762cd951a455 = {
|
||||
0xa5cd762cd951a455, b_a5cd762cd951a455.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_a5cd762cd951a455, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_f98d843bfd7004a3 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
163, 4, 112, 253, 59, 132, 141, 249,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 54, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_f98d843bfd7004a3 = b_f98d843bfd7004a3.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_f98d843bfd7004a3 = {
|
||||
0xf98d843bfd7004a3, b_f98d843bfd7004a3.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_f98d843bfd7004a3, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_b86e6369214c01c8 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
200, 1, 76, 33, 105, 99, 110, 184,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 55, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_b86e6369214c01c8 = b_b86e6369214c01c8.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_b86e6369214c01c8 = {
|
||||
0xb86e6369214c01c8, b_b86e6369214c01c8.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_b86e6369214c01c8, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_f416ec09499d9d19 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
25, 157, 157, 73, 9, 236, 22, 244,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 56, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_f416ec09499d9d19 = b_f416ec09499d9d19.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_f416ec09499d9d19 = {
|
||||
0xf416ec09499d9d19, b_f416ec09499d9d19.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_f416ec09499d9d19, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_a1680744031fdb2d = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
45, 219, 31, 3, 68, 7, 104, 161,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 234, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 57, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_a1680744031fdb2d = b_a1680744031fdb2d.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_a1680744031fdb2d = {
|
||||
0xa1680744031fdb2d, b_a1680744031fdb2d.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_a1680744031fdb2d, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_cb9fd56c7057593a = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
58, 89, 87, 112, 108, 213, 159, 203,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 48, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_cb9fd56c7057593a = b_cb9fd56c7057593a.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_cb9fd56c7057593a = {
|
||||
0xcb9fd56c7057593a, b_cb9fd56c7057593a.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_cb9fd56c7057593a, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_c2243c65e0340384 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
132, 3, 52, 224, 101, 60, 36, 194,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 49, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_c2243c65e0340384 = b_c2243c65e0340384.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_c2243c65e0340384 = {
|
||||
0xc2243c65e0340384, b_c2243c65e0340384.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_c2243c65e0340384, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_9ccdc8676701b412 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
18, 180, 1, 103, 103, 200, 205, 156,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 50, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_9ccdc8676701b412 = b_9ccdc8676701b412.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_9ccdc8676701b412 = {
|
||||
0x9ccdc8676701b412, b_9ccdc8676701b412.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_9ccdc8676701b412, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_cd96dafb67a082d0 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
208, 130, 160, 103, 251, 218, 150, 205,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 51, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_cd96dafb67a082d0 = b_cd96dafb67a082d0.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_cd96dafb67a082d0 = {
|
||||
0xcd96dafb67a082d0, b_cd96dafb67a082d0.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_cd96dafb67a082d0, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_b057204d7deadf3f = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
63, 223, 234, 125, 77, 32, 87, 176,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 52, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_b057204d7deadf3f = b_b057204d7deadf3f.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_b057204d7deadf3f = {
|
||||
0xb057204d7deadf3f, b_b057204d7deadf3f.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_b057204d7deadf3f, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_bd443b539493bc68 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
104, 188, 147, 148, 83, 59, 68, 189,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 53, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_bd443b539493bc68 = b_bd443b539493bc68.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_bd443b539493bc68 = {
|
||||
0xbd443b539493bc68, b_bd443b539493bc68.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_bd443b539493bc68, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_fc6241ed8877b611 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
17, 182, 119, 136, 237, 65, 98, 252,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 54, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_fc6241ed8877b611 = b_fc6241ed8877b611.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_fc6241ed8877b611 = {
|
||||
0xfc6241ed8877b611, b_fc6241ed8877b611.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_fc6241ed8877b611, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_a30662f84033036c = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
108, 3, 51, 64, 248, 98, 6, 163,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 55, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_a30662f84033036c = b_a30662f84033036c.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_a30662f84033036c = {
|
||||
0xa30662f84033036c, b_a30662f84033036c.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_a30662f84033036c, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_c86a3d38d13eb3ef = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
239, 179, 62, 209, 56, 61, 106, 200,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 56, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_c86a3d38d13eb3ef = b_c86a3d38d13eb3ef.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_c86a3d38d13eb3ef = {
|
||||
0xc86a3d38d13eb3ef, b_c86a3d38d13eb3ef.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_c86a3d38d13eb3ef, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
static const ::capnp::_::AlignedData<17> b_a4f1eb3323f5f582 = {
|
||||
{ 0, 0, 0, 0, 5, 0, 6, 0,
|
||||
130, 245, 245, 35, 51, 235, 241, 164,
|
||||
13, 0, 0, 0, 1, 0, 0, 0,
|
||||
89, 10, 85, 29, 102, 186, 38, 181,
|
||||
0, 0, 7, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
21, 0, 0, 0, 242, 0, 0, 0,
|
||||
33, 0, 0, 0, 7, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
0, 0, 0, 0, 0, 0, 0, 0,
|
||||
99, 117, 115, 116, 111, 109, 46, 99,
|
||||
97, 112, 110, 112, 58, 67, 117, 115,
|
||||
116, 111, 109, 82, 101, 115, 101, 114,
|
||||
118, 101, 100, 49, 57, 0, 0, 0,
|
||||
0, 0, 0, 0, 1, 0, 1, 0, }
|
||||
};
|
||||
::capnp::word const* const bp_a4f1eb3323f5f582 = b_a4f1eb3323f5f582.words;
|
||||
#if !CAPNP_LITE
|
||||
const ::capnp::_::RawSchema s_a4f1eb3323f5f582 = {
|
||||
0xa4f1eb3323f5f582, b_a4f1eb3323f5f582.words, 17, nullptr, nullptr,
|
||||
0, 0, nullptr, nullptr, nullptr, { &s_a4f1eb3323f5f582, nullptr, nullptr, 0, 0, nullptr }, false
|
||||
};
|
||||
#endif // !CAPNP_LITE
|
||||
} // namespace schemas
|
||||
} // namespace capnp
|
||||
|
||||
// =======================================================================================
|
||||
|
||||
namespace cereal {
|
||||
|
||||
// DpControlsState
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t DpControlsState::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t DpControlsState::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind DpControlsState::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* DpControlsState::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// ModelExt
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t ModelExt::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t ModelExt::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind ModelExt::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* ModelExt::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved2
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved2::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved2::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved2::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved2::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved3
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved3::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved3::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved3::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved3::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved4
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved4::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved4::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved4::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved4::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved5
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved5::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved5::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved5::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved5::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved6
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved6::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved6::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved6::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved6::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved7
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved7::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved7::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved7::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved7::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved8
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved8::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved8::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved8::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved8::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved9
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved9::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved9::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved9::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved9::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved10
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved10::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved10::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved10::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved10::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved11
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved11::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved11::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved11::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved11::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved12
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved12::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved12::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved12::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved12::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved13
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved13::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved13::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved13::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved13::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved14
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved14::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved14::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved14::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved14::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved15
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved15::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved15::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved15::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved15::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved16
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved16::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved16::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved16::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved16::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved17
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved17::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved17::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved17::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved17::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved18
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved18::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved18::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved18::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved18::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
// CustomReserved19
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr uint16_t CustomReserved19::_capnpPrivate::dataWordSize;
|
||||
constexpr uint16_t CustomReserved19::_capnpPrivate::pointerCount;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#if !CAPNP_LITE
|
||||
#if CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
constexpr ::capnp::Kind CustomReserved19::_capnpPrivate::kind;
|
||||
constexpr ::capnp::_::RawSchema const* CustomReserved19::_capnpPrivate::schema;
|
||||
#endif // !CAPNP_NEED_REDUNDANT_CONSTEXPR_DECL
|
||||
#endif // !CAPNP_LITE
|
||||
|
||||
|
||||
} // namespace
|
||||
|
||||
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,26 @@
|
||||
# Copyright (c) 2013-2014 Sandstorm Development Group, Inc. and contributors
|
||||
# Licensed under the MIT License:
|
||||
#
|
||||
# Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
# of this software and associated documentation files (the "Software"), to deal
|
||||
# in the Software without restriction, including without limitation the rights
|
||||
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
# copies of the Software, and to permit persons to whom the Software is
|
||||
# furnished to do so, subject to the following conditions:
|
||||
#
|
||||
# The above copyright notice and this permission notice shall be included in
|
||||
# all copies or substantial portions of the Software.
|
||||
#
|
||||
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
# AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
|
||||
# THE SOFTWARE.
|
||||
|
||||
@0xbdf87d7bb8304e81;
|
||||
$namespace("capnp::annotations");
|
||||
|
||||
annotation namespace(file): Text;
|
||||
annotation name(field, enumerant, struct, enum, interface, method, param, group, union): Text;
|
||||
@@ -0,0 +1,574 @@
|
||||
using Cxx = import "./include/c++.capnp";
|
||||
$Cxx.namespace("cereal");
|
||||
|
||||
@0x80ef1ec4889c2a63;
|
||||
|
||||
# legacy.capnp: a home for deprecated structs
|
||||
|
||||
struct LogRotate @0x9811e1f38f62f2d1 {
|
||||
segmentNum @0 :Int32;
|
||||
path @1 :Text;
|
||||
}
|
||||
|
||||
struct LiveUI @0xc08240f996aefced {
|
||||
rearViewCam @0 :Bool;
|
||||
alertText1 @1 :Text;
|
||||
alertText2 @2 :Text;
|
||||
awarenessStatus @3 :Float32;
|
||||
}
|
||||
|
||||
struct UiLayoutState @0x88dcce08ad29dda0 {
|
||||
activeApp @0 :App;
|
||||
sidebarCollapsed @1 :Bool;
|
||||
mapEnabled @2 :Bool;
|
||||
mockEngaged @3 :Bool;
|
||||
|
||||
enum App @0x9917470acf94d285 {
|
||||
home @0;
|
||||
music @1;
|
||||
nav @2;
|
||||
settings @3;
|
||||
none @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct OrbslamCorrection @0x8afd33dc9b35e1aa {
|
||||
correctionMonoTime @0 :UInt64;
|
||||
prePositionECEF @1 :List(Float64);
|
||||
postPositionECEF @2 :List(Float64);
|
||||
prePoseQuatECEF @3 :List(Float32);
|
||||
postPoseQuatECEF @4 :List(Float32);
|
||||
numInliers @5 :UInt32;
|
||||
}
|
||||
|
||||
struct EthernetPacket @0xa99a9d5b33cf5859 {
|
||||
pkt @0 :Data;
|
||||
ts @1 :Float32;
|
||||
}
|
||||
|
||||
struct CellInfo @0xcff7566681c277ce {
|
||||
timestamp @0 :UInt64;
|
||||
repr @1 :Text; # android toString() for now
|
||||
}
|
||||
|
||||
struct WifiScan @0xd4df5a192382ba0b {
|
||||
bssid @0 :Text;
|
||||
ssid @1 :Text;
|
||||
capabilities @2 :Text;
|
||||
frequency @3 :Int32;
|
||||
level @4 :Int32;
|
||||
timestamp @5 :Int64;
|
||||
|
||||
centerFreq0 @6 :Int32;
|
||||
centerFreq1 @7 :Int32;
|
||||
channelWidth @8 :ChannelWidth;
|
||||
operatorFriendlyName @9 :Text;
|
||||
venueName @10 :Text;
|
||||
is80211mcResponder @11 :Bool;
|
||||
passpoint @12 :Bool;
|
||||
|
||||
distanceCm @13 :Int32;
|
||||
distanceSdCm @14 :Int32;
|
||||
|
||||
enum ChannelWidth @0xcb6a279f015f6b51 {
|
||||
w20Mhz @0;
|
||||
w40Mhz @1;
|
||||
w80Mhz @2;
|
||||
w160Mhz @3;
|
||||
w80Plus80Mhz @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct LiveEventData @0x94b7baa90c5c321e {
|
||||
name @0 :Text;
|
||||
value @1 :Int32;
|
||||
}
|
||||
|
||||
struct ModelData @0xb8aad62cffef28a9 {
|
||||
frameId @0 :UInt32;
|
||||
frameAge @12 :UInt32;
|
||||
frameDropPerc @13 :Float32;
|
||||
timestampEof @9 :UInt64;
|
||||
modelExecutionTime @14 :Float32;
|
||||
gpuExecutionTime @16 :Float32;
|
||||
rawPred @15 :Data;
|
||||
|
||||
path @1 :PathData;
|
||||
leftLane @2 :PathData;
|
||||
rightLane @3 :PathData;
|
||||
lead @4 :LeadData;
|
||||
freePath @6 :List(Float32);
|
||||
|
||||
settings @5 :ModelSettings;
|
||||
leadFuture @7 :LeadData;
|
||||
speed @8 :List(Float32);
|
||||
meta @10 :MetaData;
|
||||
longitudinal @11 :LongitudinalData;
|
||||
|
||||
struct PathData @0x8817eeea389e9f08 {
|
||||
points @0 :List(Float32);
|
||||
prob @1 :Float32;
|
||||
std @2 :Float32;
|
||||
stds @3 :List(Float32);
|
||||
poly @4 :List(Float32);
|
||||
validLen @5 :Float32;
|
||||
}
|
||||
|
||||
struct LeadData @0xd1c9bef96d26fa91 {
|
||||
dist @0 :Float32;
|
||||
prob @1 :Float32;
|
||||
std @2 :Float32;
|
||||
relVel @3 :Float32;
|
||||
relVelStd @4 :Float32;
|
||||
relY @5 :Float32;
|
||||
relYStd @6 :Float32;
|
||||
relA @7 :Float32;
|
||||
relAStd @8 :Float32;
|
||||
}
|
||||
|
||||
struct ModelSettings @0xa26e3710efd3e914 {
|
||||
bigBoxX @0 :UInt16;
|
||||
bigBoxY @1 :UInt16;
|
||||
bigBoxWidth @2 :UInt16;
|
||||
bigBoxHeight @3 :UInt16;
|
||||
boxProjection @4 :List(Float32);
|
||||
yuvCorrection @5 :List(Float32);
|
||||
inputTransform @6 :List(Float32);
|
||||
}
|
||||
|
||||
struct MetaData @0x9744f25fb60f2bf8 {
|
||||
engagedProb @0 :Float32;
|
||||
desirePrediction @1 :List(Float32);
|
||||
brakeDisengageProb @2 :Float32;
|
||||
gasDisengageProb @3 :Float32;
|
||||
steerOverrideProb @4 :Float32;
|
||||
desireState @5 :List(Float32);
|
||||
}
|
||||
|
||||
struct LongitudinalData @0xf98f999c6a071122 {
|
||||
distances @2 :List(Float32);
|
||||
speeds @0 :List(Float32);
|
||||
accelerations @1 :List(Float32);
|
||||
}
|
||||
}
|
||||
|
||||
struct ECEFPoint @0xc25bbbd524983447 {
|
||||
x @0 :Float64;
|
||||
y @1 :Float64;
|
||||
z @2 :Float64;
|
||||
}
|
||||
|
||||
struct ECEFPointDEPRECATED @0xe10e21168db0c7f7 {
|
||||
x @0 :Float32;
|
||||
y @1 :Float32;
|
||||
z @2 :Float32;
|
||||
}
|
||||
|
||||
struct GPSPlannerPoints @0xab54c59699f8f9f3 {
|
||||
curPosDEPRECATED @0 :ECEFPointDEPRECATED;
|
||||
pointsDEPRECATED @1 :List(ECEFPointDEPRECATED);
|
||||
curPos @6 :ECEFPoint;
|
||||
points @7 :List(ECEFPoint);
|
||||
valid @2 :Bool;
|
||||
trackName @3 :Text;
|
||||
speedLimit @4 :Float32;
|
||||
accelTarget @5 :Float32;
|
||||
}
|
||||
|
||||
struct GPSPlannerPlan @0xf5ad1d90cdc1dd6b {
|
||||
valid @0 :Bool;
|
||||
poly @1 :List(Float32);
|
||||
trackName @2 :Text;
|
||||
speed @3 :Float32;
|
||||
acceleration @4 :Float32;
|
||||
pointsDEPRECATED @5 :List(ECEFPointDEPRECATED);
|
||||
points @6 :List(ECEFPoint);
|
||||
xLookahead @7 :Float32;
|
||||
}
|
||||
|
||||
struct UiNavigationEvent @0x90c8426c3eaddd3b {
|
||||
type @0: Type;
|
||||
status @1: Status;
|
||||
distanceTo @2: Float32;
|
||||
endRoadPointDEPRECATED @3: ECEFPointDEPRECATED;
|
||||
endRoadPoint @4: ECEFPoint;
|
||||
|
||||
enum Type @0xe8db07dcf8fcea05 {
|
||||
none @0;
|
||||
laneChangeLeft @1;
|
||||
laneChangeRight @2;
|
||||
mergeLeft @3;
|
||||
mergeRight @4;
|
||||
turnLeft @5;
|
||||
turnRight @6;
|
||||
}
|
||||
|
||||
enum Status @0xb9aa88c75ef99a1f {
|
||||
none @0;
|
||||
passive @1;
|
||||
approaching @2;
|
||||
active @3;
|
||||
}
|
||||
}
|
||||
|
||||
struct LiveLocationData @0xb99b2bc7a57e8128 {
|
||||
status @0 :UInt8;
|
||||
|
||||
# 3D fix
|
||||
lat @1 :Float64;
|
||||
lon @2 :Float64;
|
||||
alt @3 :Float32; # m
|
||||
|
||||
# speed
|
||||
speed @4 :Float32; # m/s
|
||||
|
||||
# NED velocity components
|
||||
vNED @5 :List(Float32);
|
||||
|
||||
# roll, pitch, heading (x,y,z)
|
||||
roll @6 :Float32; # WRT to center of earth?
|
||||
pitch @7 :Float32; # WRT to center of earth?
|
||||
heading @8 :Float32; # WRT to north?
|
||||
|
||||
# what are these?
|
||||
wanderAngle @9 :Float32;
|
||||
trackAngle @10 :Float32;
|
||||
|
||||
# car frame -- https://upload.wikimedia.org/wikipedia/commons/f/f5/RPY_angles_of_cars.png
|
||||
|
||||
# gyro, in car frame, deg/s
|
||||
gyro @11 :List(Float32);
|
||||
|
||||
# accel, in car frame, m/s^2
|
||||
accel @12 :List(Float32);
|
||||
|
||||
accuracy @13 :Accuracy;
|
||||
|
||||
source @14 :SensorSource;
|
||||
# if we are fixing a location in the past
|
||||
fixMonoTime @15 :UInt64;
|
||||
|
||||
gpsWeek @16 :Int32;
|
||||
timeOfWeek @17 :Float64;
|
||||
|
||||
positionECEF @18 :List(Float64);
|
||||
poseQuatECEF @19 :List(Float32);
|
||||
pitchCalibration @20 :Float32;
|
||||
yawCalibration @21 :Float32;
|
||||
imuFrame @22 :List(Float32);
|
||||
|
||||
struct Accuracy @0x943dc4625473b03f {
|
||||
pNEDError @0 :List(Float32);
|
||||
vNEDError @1 :List(Float32);
|
||||
rollError @2 :Float32;
|
||||
pitchError @3 :Float32;
|
||||
headingError @4 :Float32;
|
||||
ellipsoidSemiMajorError @5 :Float32;
|
||||
ellipsoidSemiMinorError @6 :Float32;
|
||||
ellipsoidOrientationError @7 :Float32;
|
||||
}
|
||||
|
||||
enum SensorSource @0xc871d3cc252af657 {
|
||||
applanix @0;
|
||||
kalman @1;
|
||||
orbslam @2;
|
||||
timing @3;
|
||||
dummy @4;
|
||||
}
|
||||
}
|
||||
|
||||
struct OrbOdometry @0xd7700859ed1f5b76 {
|
||||
# timing first
|
||||
startMonoTime @0 :UInt64;
|
||||
endMonoTime @1 :UInt64;
|
||||
|
||||
# fundamental matrix and error
|
||||
f @2: List(Float64);
|
||||
err @3: Float64;
|
||||
|
||||
# number of inlier points
|
||||
inliers @4: Int32;
|
||||
|
||||
# for debug only
|
||||
# indexed by endMonoTime features
|
||||
# value is startMonoTime feature match
|
||||
# -1 if no match
|
||||
matches @5: List(Int16);
|
||||
}
|
||||
|
||||
struct OrbFeatures @0xcd60164a8a0159ef {
|
||||
timestampEof @0 :UInt64;
|
||||
# transposed arrays of normalized image coordinates
|
||||
# len(xs) == len(ys) == len(descriptors) * 32
|
||||
xs @1 :List(Float32);
|
||||
ys @2 :List(Float32);
|
||||
descriptors @3 :Data;
|
||||
octaves @4 :List(Int8);
|
||||
|
||||
# match index to last OrbFeatures
|
||||
# -1 if no match
|
||||
timestampLastEof @5 :UInt64;
|
||||
matches @6: List(Int16);
|
||||
}
|
||||
|
||||
struct OrbFeaturesSummary @0xd500d30c5803fa4f {
|
||||
timestampEof @0 :UInt64;
|
||||
timestampLastEof @1 :UInt64;
|
||||
|
||||
featureCount @2 :UInt16;
|
||||
matchCount @3 :UInt16;
|
||||
computeNs @4 :UInt64;
|
||||
}
|
||||
|
||||
struct OrbKeyFrame @0xc8233c0345e27e24 {
|
||||
# this is a globally unique id for the KeyFrame
|
||||
id @0: UInt64;
|
||||
|
||||
# this is the location of the KeyFrame
|
||||
pos @1: ECEFPoint;
|
||||
|
||||
# these are the features in the world
|
||||
# len(dpos) == len(descriptors) * 32
|
||||
dpos @2 :List(ECEFPoint);
|
||||
descriptors @3 :Data;
|
||||
}
|
||||
|
||||
struct KalmanOdometry @0x92e21bb7ea38793a {
|
||||
trans @0 :List(Float32); # m/s in device frame
|
||||
rot @1 :List(Float32); # rad/s in device frame
|
||||
transStd @2 :List(Float32); # std m/s in device frame
|
||||
rotStd @3 :List(Float32); # std rad/s in device frame
|
||||
}
|
||||
|
||||
struct OrbObservation @0x9b326d4e436afec7 {
|
||||
observationMonoTime @0 :UInt64;
|
||||
normalizedCoordinates @1 :List(Float32);
|
||||
locationECEF @2 :List(Float64);
|
||||
matchDistance @3: UInt32;
|
||||
}
|
||||
|
||||
struct CalibrationFeatures @0x8fdfadb254ea867a {
|
||||
frameId @0 :UInt32;
|
||||
|
||||
p0 @1 :List(Float32);
|
||||
p1 @2 :List(Float32);
|
||||
status @3 :List(Int8);
|
||||
}
|
||||
|
||||
struct NavStatus @0xbd8822120928120c {
|
||||
isNavigating @0 :Bool;
|
||||
currentAddress @1 :Address;
|
||||
|
||||
struct Address @0xce7cd672cacc7814 {
|
||||
title @0 :Text;
|
||||
lat @1 :Float64;
|
||||
lng @2 :Float64;
|
||||
house @3 :Text;
|
||||
address @4 :Text;
|
||||
street @5 :Text;
|
||||
city @6 :Text;
|
||||
state @7 :Text;
|
||||
country @8 :Text;
|
||||
}
|
||||
}
|
||||
|
||||
struct NavUpdate @0xdb98be6565516acb {
|
||||
isNavigating @0 :Bool;
|
||||
curSegment @1 :Int32;
|
||||
segments @2 :List(Segment);
|
||||
|
||||
struct LatLng @0x9eaef9187cadbb9b {
|
||||
lat @0 :Float64;
|
||||
lng @1 :Float64;
|
||||
}
|
||||
|
||||
struct Segment @0xa5b39b4fc4d7da3f {
|
||||
from @0 :LatLng;
|
||||
to @1 :LatLng;
|
||||
updateTime @2 :Int32;
|
||||
distance @3 :Int32;
|
||||
crossTime @4 :Int32;
|
||||
exitNo @5 :Int32;
|
||||
instruction @6 :Instruction;
|
||||
|
||||
parts @7 :List(LatLng);
|
||||
|
||||
enum Instruction @0xc5417a637451246f {
|
||||
turnLeft @0;
|
||||
turnRight @1;
|
||||
keepLeft @2;
|
||||
keepRight @3;
|
||||
straight @4;
|
||||
roundaboutExitNumber @5;
|
||||
roundaboutExit @6;
|
||||
roundaboutTurnLeft @7;
|
||||
unkn8 @8;
|
||||
roundaboutStraight @9;
|
||||
unkn10 @10;
|
||||
roundaboutTurnRight @11;
|
||||
unkn12 @12;
|
||||
roundaboutUturn @13;
|
||||
unkn14 @14;
|
||||
arrive @15;
|
||||
exitLeft @16;
|
||||
exitRight @17;
|
||||
unkn18 @18;
|
||||
uturn @19;
|
||||
# ...
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct TrafficEvent @0xacfa74a094e62626 {
|
||||
type @0 :Type;
|
||||
distance @1 :Float32;
|
||||
action @2 :Action;
|
||||
resuming @3 :Bool;
|
||||
|
||||
enum Type @0xd85d75253435bf4b {
|
||||
stopSign @0;
|
||||
lightRed @1;
|
||||
lightYellow @2;
|
||||
lightGreen @3;
|
||||
stopLight @4;
|
||||
}
|
||||
|
||||
enum Action @0xa6f6ce72165ccb49 {
|
||||
none @0;
|
||||
yield @1;
|
||||
stop @2;
|
||||
resumeReady @3;
|
||||
}
|
||||
|
||||
}
|
||||
|
||||
|
||||
struct AndroidGnss @0xdfdf30d03fc485bd {
|
||||
union {
|
||||
measurements @0 :Measurements;
|
||||
navigationMessage @1 :NavigationMessage;
|
||||
}
|
||||
|
||||
struct Measurements @0xa20710d4f428d6cd {
|
||||
clock @0 :Clock;
|
||||
measurements @1 :List(Measurement);
|
||||
|
||||
struct Clock @0xa0e27b453a38f450 {
|
||||
timeNanos @0 :Int64;
|
||||
hardwareClockDiscontinuityCount @1 :Int32;
|
||||
|
||||
hasTimeUncertaintyNanos @2 :Bool;
|
||||
timeUncertaintyNanos @3 :Float64;
|
||||
|
||||
hasLeapSecond @4 :Bool;
|
||||
leapSecond @5 :Int32;
|
||||
|
||||
hasFullBiasNanos @6 :Bool;
|
||||
fullBiasNanos @7 :Int64;
|
||||
|
||||
hasBiasNanos @8 :Bool;
|
||||
biasNanos @9 :Float64;
|
||||
|
||||
hasBiasUncertaintyNanos @10 :Bool;
|
||||
biasUncertaintyNanos @11 :Float64;
|
||||
|
||||
hasDriftNanosPerSecond @12 :Bool;
|
||||
driftNanosPerSecond @13 :Float64;
|
||||
|
||||
hasDriftUncertaintyNanosPerSecond @14 :Bool;
|
||||
driftUncertaintyNanosPerSecond @15 :Float64;
|
||||
}
|
||||
|
||||
struct Measurement @0xd949bf717d77614d {
|
||||
svId @0 :Int32;
|
||||
constellation @1 :Constellation;
|
||||
|
||||
timeOffsetNanos @2 :Float64;
|
||||
state @3 :Int32;
|
||||
receivedSvTimeNanos @4 :Int64;
|
||||
receivedSvTimeUncertaintyNanos @5 :Int64;
|
||||
cn0DbHz @6 :Float64;
|
||||
pseudorangeRateMetersPerSecond @7 :Float64;
|
||||
pseudorangeRateUncertaintyMetersPerSecond @8 :Float64;
|
||||
accumulatedDeltaRangeState @9 :Int32;
|
||||
accumulatedDeltaRangeMeters @10 :Float64;
|
||||
accumulatedDeltaRangeUncertaintyMeters @11 :Float64;
|
||||
|
||||
hasCarrierFrequencyHz @12 :Bool;
|
||||
carrierFrequencyHz @13 :Float32;
|
||||
hasCarrierCycles @14 :Bool;
|
||||
carrierCycles @15 :Int64;
|
||||
hasCarrierPhase @16 :Bool;
|
||||
carrierPhase @17 :Float64;
|
||||
hasCarrierPhaseUncertainty @18 :Bool;
|
||||
carrierPhaseUncertainty @19 :Float64;
|
||||
hasSnrInDb @20 :Bool;
|
||||
snrInDb @21 :Float64;
|
||||
|
||||
multipathIndicator @22 :MultipathIndicator;
|
||||
|
||||
enum Constellation @0x9ef1f3ff0deb5ffb {
|
||||
unknown @0;
|
||||
gps @1;
|
||||
sbas @2;
|
||||
glonass @3;
|
||||
qzss @4;
|
||||
beidou @5;
|
||||
galileo @6;
|
||||
}
|
||||
|
||||
enum State @0xcbb9490adce12d72 {
|
||||
unknown @0;
|
||||
codeLock @1;
|
||||
bitSync @2;
|
||||
subframeSync @3;
|
||||
towDecoded @4;
|
||||
msecAmbiguous @5;
|
||||
symbolSync @6;
|
||||
gloStringSync @7;
|
||||
gloTodDecoded @8;
|
||||
bdsD2BitSync @9;
|
||||
bdsD2SubframeSync @10;
|
||||
galE1bcCodeLock @11;
|
||||
galE1c2ndCodeLock @12;
|
||||
galE1bPageSync @13;
|
||||
sbasSync @14;
|
||||
}
|
||||
|
||||
enum MultipathIndicator @0xc04e7b6231d4caa8 {
|
||||
unknown @0;
|
||||
detected @1;
|
||||
notDetected @2;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct NavigationMessage @0xe2517b083095fd4e {
|
||||
type @0 :Int32;
|
||||
svId @1 :Int32;
|
||||
messageId @2 :Int32;
|
||||
submessageId @3 :Int32;
|
||||
data @4 :Data;
|
||||
status @5 :Status;
|
||||
|
||||
enum Status @0xec1ff7996b35366f {
|
||||
unknown @0;
|
||||
parityPassed @1;
|
||||
parityRebuilt @2;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
struct LidarPts @0xe3d6685d4e9d8f7a {
|
||||
r @0 :List(UInt16); # uint16 m*500.0
|
||||
theta @1 :List(UInt16); # uint16 deg*100.0
|
||||
reflect @2 :List(UInt8); # uint8 0-255
|
||||
|
||||
# For storing out of file.
|
||||
idx @3 :UInt64;
|
||||
|
||||
# For storing in file
|
||||
pkt @4 :Data;
|
||||
}
|
||||
|
||||
|
||||
+2695
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,257 @@
|
||||
# must be built with scons
|
||||
from msgq.ipc_pyx import Context, Poller, SubSocket, PubSocket, SocketEventHandle, toggle_fake_events, \
|
||||
set_fake_prefix, get_fake_prefix, delete_fake_prefix, wait_for_one_event
|
||||
from msgq.ipc_pyx import MultiplePublishersError, IpcError
|
||||
from msgq import fake_event_handle, pub_sock, sub_sock, drain_sock_raw
|
||||
import msgq
|
||||
|
||||
import os
|
||||
import capnp
|
||||
import time
|
||||
|
||||
from typing import Optional, List, Union, Dict
|
||||
|
||||
from cereal import log
|
||||
from cereal.services import SERVICE_LIST
|
||||
from openpilot.common.util import MovingAverage
|
||||
|
||||
NO_TRAVERSAL_LIMIT = 2**64-1
|
||||
|
||||
|
||||
def reset_context():
|
||||
msgq.context = Context()
|
||||
|
||||
|
||||
def log_from_bytes(dat: bytes, struct: capnp.lib.capnp._StructModule = log.Event) -> capnp.lib.capnp._DynamicStructReader:
|
||||
with struct.from_bytes(dat, traversal_limit_in_words=NO_TRAVERSAL_LIMIT) as msg:
|
||||
return msg
|
||||
|
||||
|
||||
def new_message(service: Optional[str], size: Optional[int] = None, **kwargs) -> capnp.lib.capnp._DynamicStructBuilder:
|
||||
args = {
|
||||
'valid': False,
|
||||
'logMonoTime': int(time.monotonic() * 1e9),
|
||||
**kwargs
|
||||
}
|
||||
dat = log.Event.new_message(**args)
|
||||
if service is not None:
|
||||
if size is None:
|
||||
dat.init(service)
|
||||
else:
|
||||
dat.init(service, size)
|
||||
return dat
|
||||
|
||||
|
||||
def drain_sock(sock: SubSocket, wait_for_one: bool = False) -> List[capnp.lib.capnp._DynamicStructReader]:
|
||||
"""Receive all message currently available on the queue"""
|
||||
msgs = drain_sock_raw(sock, wait_for_one=wait_for_one)
|
||||
return [log_from_bytes(m) for m in msgs]
|
||||
|
||||
|
||||
# TODO: print when we drop packets?
|
||||
def recv_sock(sock: SubSocket, wait: bool = False) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
"""Same as drain sock, but only returns latest message. Consider using conflate instead."""
|
||||
dat = None
|
||||
|
||||
while 1:
|
||||
if wait and dat is None:
|
||||
recv = sock.receive()
|
||||
else:
|
||||
recv = sock.receive(non_blocking=True)
|
||||
|
||||
if recv is None: # Timeout hit
|
||||
break
|
||||
|
||||
dat = recv
|
||||
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one(sock: SubSocket) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
dat = sock.receive()
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one_or_none(sock: SubSocket) -> Optional[capnp.lib.capnp._DynamicStructReader]:
|
||||
dat = sock.receive(non_blocking=True)
|
||||
if dat is not None:
|
||||
dat = log_from_bytes(dat)
|
||||
return dat
|
||||
|
||||
|
||||
def recv_one_retry(sock: SubSocket) -> capnp.lib.capnp._DynamicStructReader:
|
||||
"""Keep receiving until we get a message"""
|
||||
while True:
|
||||
dat = sock.receive()
|
||||
if dat is not None:
|
||||
return log_from_bytes(dat)
|
||||
|
||||
|
||||
class FrequencyTracker:
|
||||
def __init__(self, service_freq: float, update_freq: float, is_poll: bool):
|
||||
freq = max(min(service_freq, update_freq), 1.)
|
||||
if is_poll:
|
||||
min_freq = max_freq = freq
|
||||
else:
|
||||
max_freq = min(freq, update_freq)
|
||||
if service_freq >= 2 * update_freq:
|
||||
min_freq = update_freq
|
||||
elif update_freq >= 2* service_freq:
|
||||
min_freq = freq
|
||||
else:
|
||||
min_freq = min(freq, freq / 2.)
|
||||
|
||||
self.min_freq = min_freq * 0.8
|
||||
self.max_freq = max_freq * 1.2
|
||||
self.avg_dt = MovingAverage(int(10 * freq))
|
||||
self.recent_avg_dt = MovingAverage(int(freq))
|
||||
self.prev_time = 0.0
|
||||
|
||||
def record_recv_time(self, cur_time: float) -> None:
|
||||
# TODO: Handle case where cur_time is less than prev_time
|
||||
if self.prev_time > 1e-5:
|
||||
dt = cur_time - self.prev_time
|
||||
|
||||
self.avg_dt.add_value(dt)
|
||||
self.recent_avg_dt.add_value(dt)
|
||||
|
||||
self.prev_time = cur_time
|
||||
|
||||
@property
|
||||
def valid(self) -> bool:
|
||||
if self.avg_dt.count == 0:
|
||||
return False
|
||||
|
||||
avg_freq = 1.0 / self.avg_dt.get_average()
|
||||
if self.min_freq <= avg_freq <= self.max_freq:
|
||||
return True
|
||||
|
||||
avg_freq_recent = 1.0 / self.recent_avg_dt.get_average()
|
||||
return self.min_freq <= avg_freq_recent <= self.max_freq
|
||||
|
||||
|
||||
class SubMaster:
|
||||
def __init__(self, services: List[str], poll: Optional[str] = None,
|
||||
ignore_alive: Optional[List[str]] = None, ignore_avg_freq: Optional[List[str]] = None,
|
||||
ignore_valid: Optional[List[str]] = None, addr: str = "127.0.0.1", frequency: Optional[float] = None):
|
||||
self.frame = -1
|
||||
self.services = services
|
||||
self.seen = {s: False for s in services}
|
||||
self.updated = {s: False for s in services}
|
||||
self.recv_time = {s: 0. for s in services}
|
||||
self.recv_frame = {s: 0 for s in services}
|
||||
self.sock = {}
|
||||
self.data = {}
|
||||
self.logMonoTime = {s: 0 for s in services}
|
||||
|
||||
# zero-frequency / on-demand services are always alive and presumed valid; all others must pass checks
|
||||
on_demand = {s: SERVICE_LIST[s].frequency <= 1e-5 for s in services}
|
||||
self.static_freq_services = set(s for s in services if not on_demand[s])
|
||||
self.alive = {s: on_demand[s] for s in services}
|
||||
self.freq_ok = {s: on_demand[s] for s in services}
|
||||
self.valid = {s: on_demand[s] for s in services}
|
||||
|
||||
self.freq_tracker: Dict[str, FrequencyTracker] = {}
|
||||
self.poller = Poller()
|
||||
polled_services = set([poll, ] if poll is not None else services)
|
||||
self.non_polled_services = set(services) - polled_services
|
||||
|
||||
self.ignore_average_freq = [] if ignore_avg_freq is None else ignore_avg_freq
|
||||
self.ignore_alive = [] if ignore_alive is None else ignore_alive
|
||||
self.ignore_valid = [] if ignore_valid is None else ignore_valid
|
||||
|
||||
self.simulation = bool(int(os.getenv("SIMULATION", "0")))
|
||||
|
||||
# if freq and poll aren't specified, assume the max to be conservative
|
||||
assert frequency is None or poll is None, "Do not specify 'frequency' - frequency of the polled service will be used."
|
||||
self.update_freq = frequency or max([SERVICE_LIST[s].frequency for s in polled_services])
|
||||
|
||||
for s in services:
|
||||
p = self.poller if s not in self.non_polled_services else None
|
||||
self.sock[s] = sub_sock(s, poller=p, addr=addr, conflate=True)
|
||||
|
||||
try:
|
||||
data = new_message(s)
|
||||
except capnp.lib.capnp.KjException:
|
||||
data = new_message(s, 0) # lists
|
||||
|
||||
self.data[s] = getattr(data.as_reader(), s)
|
||||
self.freq_tracker[s] = FrequencyTracker(SERVICE_LIST[s].frequency, self.update_freq, s == poll)
|
||||
|
||||
def __getitem__(self, s: str) -> capnp.lib.capnp._DynamicStructReader:
|
||||
return self.data[s]
|
||||
|
||||
def _check_avg_freq(self, s: str) -> bool:
|
||||
return SERVICE_LIST[s].frequency > 0.99 and (s not in self.ignore_average_freq) and (s not in self.ignore_alive)
|
||||
|
||||
def update(self, timeout: int = 100) -> None:
|
||||
msgs = []
|
||||
for sock in self.poller.poll(timeout):
|
||||
msgs.append(recv_one_or_none(sock))
|
||||
|
||||
# non-blocking receive for non-polled sockets
|
||||
for s in self.non_polled_services:
|
||||
msgs.append(recv_one_or_none(self.sock[s]))
|
||||
self.update_msgs(time.monotonic(), msgs)
|
||||
|
||||
def update_msgs(self, cur_time: float, msgs: List[capnp.lib.capnp._DynamicStructReader]) -> None:
|
||||
self.frame += 1
|
||||
self.updated = dict.fromkeys(self.services, False)
|
||||
for msg in msgs:
|
||||
if msg is None:
|
||||
continue
|
||||
|
||||
s = msg.which()
|
||||
self.seen[s] = True
|
||||
self.updated[s] = True
|
||||
|
||||
self.freq_tracker[s].record_recv_time(cur_time)
|
||||
self.recv_time[s] = cur_time
|
||||
self.recv_frame[s] = self.frame
|
||||
self.data[s] = getattr(msg, s)
|
||||
self.logMonoTime[s] = msg.logMonoTime
|
||||
self.valid[s] = msg.valid
|
||||
|
||||
for s in self.static_freq_services:
|
||||
# alive if delay is within 10x the expected frequency; checks relaxed in simulator
|
||||
self.alive[s] = (cur_time - self.recv_time[s]) < (10. / SERVICE_LIST[s].frequency) or (self.seen[s] and self.simulation)
|
||||
self.freq_ok[s] = self.freq_tracker[s].valid or self.simulation
|
||||
|
||||
def all_alive(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.alive[s] for s in (service_list or self.services) if s not in self.ignore_alive)
|
||||
|
||||
def all_freq_ok(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.freq_ok[s] for s in (service_list or self.services) if self._check_avg_freq(s))
|
||||
|
||||
def all_valid(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return all(self.valid[s] for s in (service_list or self.services) if s not in self.ignore_valid)
|
||||
|
||||
def all_checks(self, service_list: Optional[List[str]] = None) -> bool:
|
||||
return self.all_alive(service_list) and self.all_freq_ok(service_list) and self.all_valid(service_list)
|
||||
|
||||
|
||||
class PubMaster:
|
||||
def __init__(self, services: List[str]):
|
||||
self.sock = {}
|
||||
for s in services:
|
||||
self.sock[s] = pub_sock(s)
|
||||
|
||||
def send(self, s: str, dat: Union[bytes, capnp.lib.capnp._DynamicStructBuilder]) -> None:
|
||||
if not isinstance(dat, bytes):
|
||||
dat = dat.to_bytes()
|
||||
self.sock[s].send(dat)
|
||||
|
||||
def wait_for_readers_to_update(self, s: str, timeout: int, dt: float = 0.05) -> bool:
|
||||
for _ in range(int(timeout*(1./dt))):
|
||||
if self.sock[s].all_readers_updated():
|
||||
return True
|
||||
time.sleep(dt)
|
||||
return False
|
||||
|
||||
def all_readers_updated(self, s: str) -> bool:
|
||||
return self.sock[s].all_readers_updated() # type: ignore
|
||||
Executable
BIN
Binary file not shown.
@@ -0,0 +1,102 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstddef>
|
||||
#include <map>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
#include <utility>
|
||||
|
||||
#include <capnp/serialize.h>
|
||||
|
||||
#include "cereal/gen/cpp/log.capnp.h"
|
||||
#include "common/timing.h"
|
||||
#include "msgq/ipc.h"
|
||||
|
||||
class SubMaster {
|
||||
public:
|
||||
SubMaster(const std::vector<const char *> &service_list, const std::vector<const char *> &poll = {},
|
||||
const char *address = nullptr, const std::vector<const char *> &ignore_alive = {});
|
||||
void update(int timeout = 1000);
|
||||
void update_msgs(uint64_t current_time, const std::vector<std::pair<std::string, cereal::Event::Reader>> &messages);
|
||||
inline bool allAlive(const std::vector<const char *> &service_list = {}) { return all_(service_list, false, true); }
|
||||
inline bool allValid(const std::vector<const char *> &service_list = {}) { return all_(service_list, true, false); }
|
||||
inline bool allAliveAndValid(const std::vector<const char *> &service_list = {}) { return all_(service_list, true, true); }
|
||||
void drain();
|
||||
~SubMaster();
|
||||
|
||||
uint64_t frame = 0;
|
||||
bool updated(const char *name) const;
|
||||
bool alive(const char *name) const;
|
||||
bool valid(const char *name) const;
|
||||
uint64_t rcv_frame(const char *name) const;
|
||||
uint64_t rcv_time(const char *name) const;
|
||||
cereal::Event::Reader &operator[](const char *name) const;
|
||||
|
||||
private:
|
||||
bool all_(const std::vector<const char *> &service_list, bool valid, bool alive);
|
||||
Poller *poller_ = nullptr;
|
||||
struct SubMessage;
|
||||
std::map<SubSocket *, SubMessage *> messages_;
|
||||
std::map<std::string, SubMessage *> services_;
|
||||
};
|
||||
|
||||
class MessageBuilder : public capnp::MallocMessageBuilder {
|
||||
public:
|
||||
MessageBuilder() = default;
|
||||
|
||||
cereal::Event::Builder initEvent(bool valid = true) {
|
||||
cereal::Event::Builder event = initRoot<cereal::Event>();
|
||||
event.setLogMonoTime(nanos_since_boot());
|
||||
event.setValid(valid);
|
||||
return event;
|
||||
}
|
||||
|
||||
kj::ArrayPtr<capnp::byte> toBytes() {
|
||||
heapArray_ = capnp::messageToFlatArray(*this);
|
||||
return heapArray_.asBytes();
|
||||
}
|
||||
|
||||
size_t getSerializedSize() {
|
||||
return capnp::computeSerializedSizeInWords(*this) * sizeof(capnp::word);
|
||||
}
|
||||
|
||||
int serializeToBuffer(unsigned char *buffer, size_t buffer_size) {
|
||||
size_t serialized_size = getSerializedSize();
|
||||
if (serialized_size > buffer_size) { return -1; }
|
||||
kj::ArrayOutputStream out(kj::ArrayPtr<capnp::byte>(buffer, buffer_size));
|
||||
capnp::writeMessage(out, *this);
|
||||
return serialized_size;
|
||||
}
|
||||
|
||||
private:
|
||||
kj::Array<capnp::word> heapArray_;
|
||||
};
|
||||
|
||||
class PubMaster {
|
||||
public:
|
||||
PubMaster(const std::vector<const char *> &service_list);
|
||||
inline int send(const char *name, capnp::byte *data, size_t size) { return sockets_.at(name)->send((char *)data, size); }
|
||||
int send(const char *name, MessageBuilder &msg);
|
||||
~PubMaster();
|
||||
|
||||
private:
|
||||
std::map<std::string, PubSocket *> sockets_;
|
||||
};
|
||||
|
||||
class AlignedBuffer {
|
||||
public:
|
||||
kj::ArrayPtr<const capnp::word> align(const char *data, const size_t size) {
|
||||
words_size = size / sizeof(capnp::word) + 1;
|
||||
if (aligned_buf.size() < words_size) {
|
||||
aligned_buf = kj::heapArray<capnp::word>(words_size < 512 ? 512 : words_size);
|
||||
}
|
||||
memcpy(aligned_buf.begin(), data, size);
|
||||
return aligned_buf.slice(0, words_size);
|
||||
}
|
||||
inline kj::ArrayPtr<const capnp::word> align(Message *m) {
|
||||
return align(m->getData(), m->getSize());
|
||||
}
|
||||
private:
|
||||
kj::Array<capnp::word> aligned_buf;
|
||||
size_t words_size;
|
||||
};
|
||||
@@ -0,0 +1,37 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <map>
|
||||
#include <memory>
|
||||
#include <mutex>
|
||||
#include <string>
|
||||
#include <vector>
|
||||
|
||||
#define private public
|
||||
#include "msgq/impl_msgq.h"
|
||||
#include "msgq/impl_zmq.h"
|
||||
|
||||
class MsgqToZmq {
|
||||
public:
|
||||
MsgqToZmq() {}
|
||||
void run(const std::vector<std::string> &endpoints, const std::string &ip);
|
||||
|
||||
protected:
|
||||
void registerSockets();
|
||||
void zmqMonitorThread();
|
||||
|
||||
struct SocketPair {
|
||||
std::string endpoint;
|
||||
std::unique_ptr<ZMQPubSocket> pub_sock;
|
||||
std::unique_ptr<MSGQSubSocket> sub_sock;
|
||||
int connected_clients = 0;
|
||||
};
|
||||
|
||||
std::unique_ptr<MSGQContext> msgq_context;
|
||||
std::unique_ptr<ZMQContext> zmq_context;
|
||||
std::mutex mutex;
|
||||
std::condition_variable cv;
|
||||
std::unique_ptr<MSGQPoller> msgq_poller;
|
||||
std::map<SubSocket *, ZMQPubSocket *> sub2pub;
|
||||
std::vector<SocketPair> socket_pairs;
|
||||
};
|
||||
@@ -0,0 +1,185 @@
|
||||
import os
|
||||
import capnp
|
||||
import multiprocessing
|
||||
import numbers
|
||||
import random
|
||||
import threading
|
||||
import time
|
||||
from parameterized import parameterized
|
||||
import pytest
|
||||
|
||||
from cereal import log, car
|
||||
import cereal.messaging as messaging
|
||||
from cereal.services import SERVICE_LIST
|
||||
|
||||
events = [evt for evt in log.Event.schema.union_fields if evt in SERVICE_LIST.keys()]
|
||||
|
||||
def random_sock():
|
||||
return random.choice(events)
|
||||
|
||||
def random_socks(num_socks=10):
|
||||
return list({random_sock() for _ in range(num_socks)})
|
||||
|
||||
def random_bytes(length=1000):
|
||||
return bytes([random.randrange(0xFF) for _ in range(length)])
|
||||
|
||||
def zmq_sleep(t=1):
|
||||
if "ZMQ" in os.environ:
|
||||
time.sleep(t)
|
||||
|
||||
|
||||
# TODO: this should take any capnp struct and returrn a msg with random populated data
|
||||
def random_carstate():
|
||||
fields = ["vEgo", "aEgo", "brake", "steeringAngleDeg"]
|
||||
msg = messaging.new_message("carState")
|
||||
cs = msg.carState
|
||||
for f in fields:
|
||||
setattr(cs, f, random.random() * 10)
|
||||
return msg
|
||||
|
||||
# TODO: this should compare any capnp structs
|
||||
def assert_carstate(cs1, cs2):
|
||||
for f in car.CarState.schema.non_union_fields:
|
||||
# TODO: check all types
|
||||
val1, val2 = getattr(cs1, f), getattr(cs2, f)
|
||||
if isinstance(val1, numbers.Number):
|
||||
assert val1 == val2, f"{f}: sent '{val1}' vs recvd '{val2}'"
|
||||
|
||||
def delayed_send(delay, sock, dat):
|
||||
def send_func():
|
||||
sock.send(dat)
|
||||
threading.Timer(delay, send_func).start()
|
||||
|
||||
|
||||
class TestMessaging:
|
||||
def setUp(self):
|
||||
# TODO: ZMQ tests are too slow; all sleeps will need to be
|
||||
# replaced with logic to block on the necessary condition
|
||||
if "ZMQ" in os.environ:
|
||||
pytest.skip()
|
||||
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep()
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_new_message(self, evt):
|
||||
try:
|
||||
msg = messaging.new_message(evt)
|
||||
except capnp.lib.capnp.KjException:
|
||||
msg = messaging.new_message(evt, random.randrange(200))
|
||||
assert (time.monotonic() - msg.logMonoTime) < 0.1
|
||||
assert not msg.valid
|
||||
assert evt == msg.which()
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_pub_sock(self, evt):
|
||||
messaging.pub_sock(evt)
|
||||
|
||||
@parameterized.expand(events)
|
||||
def test_sub_sock(self, evt):
|
||||
messaging.sub_sock(evt)
|
||||
|
||||
@parameterized.expand([
|
||||
(messaging.drain_sock, capnp._DynamicStructReader),
|
||||
(messaging.drain_sock_raw, bytes),
|
||||
])
|
||||
def test_drain_sock(self, func, expected_type):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=1000)
|
||||
zmq_sleep()
|
||||
|
||||
# no wait and no msgs in queue
|
||||
msgs = func(sub_sock)
|
||||
assert isinstance(msgs, list)
|
||||
assert len(msgs) == 0
|
||||
|
||||
# no wait but msgs are queued up
|
||||
num_msgs = random.randrange(3, 10)
|
||||
for _ in range(num_msgs):
|
||||
pub_sock.send(messaging.new_message(sock).to_bytes())
|
||||
time.sleep(0.1)
|
||||
msgs = func(sub_sock)
|
||||
assert isinstance(msgs, list)
|
||||
assert all(isinstance(msg, expected_type) for msg in msgs)
|
||||
assert len(msgs) == num_msgs
|
||||
|
||||
def test_recv_sock(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=100)
|
||||
zmq_sleep()
|
||||
|
||||
# no wait and no msg in queue, socket should timeout
|
||||
recvd = messaging.recv_sock(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# no wait and one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
time.sleep(0.01)
|
||||
recvd = messaging.recv_sock(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
# https://github.com/python/mypy/issues/13038
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
def test_recv_one(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=1000)
|
||||
zmq_sleep()
|
||||
|
||||
# no msg in queue, socket should timeout
|
||||
recvd = messaging.recv_one(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
recvd = messaging.recv_one(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
@pytest.mark.xfail(condition="ZMQ" in os.environ, reason='ZMQ detected')
|
||||
def test_recv_one_or_none(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock)
|
||||
zmq_sleep()
|
||||
|
||||
# no msg in queue, socket shouldn't block
|
||||
recvd = messaging.recv_one_or_none(sub_sock)
|
||||
assert recvd is None
|
||||
|
||||
# one msg in queue
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
recvd = messaging.recv_one_or_none(sub_sock)
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
|
||||
def test_recv_one_retry(self):
|
||||
sock = "carState"
|
||||
sock_timeout = 0.1
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sub_sock = messaging.sub_sock(sock, timeout=round(sock_timeout*1000))
|
||||
zmq_sleep()
|
||||
|
||||
# this test doesn't work with ZMQ since multiprocessing interrupts it
|
||||
if "ZMQ" not in os.environ:
|
||||
# wait 5 socket timeouts and make sure it's still retrying
|
||||
p = multiprocessing.Process(target=messaging.recv_one_retry, args=(sub_sock,))
|
||||
p.start()
|
||||
time.sleep(sock_timeout*5)
|
||||
assert p.is_alive()
|
||||
p.terminate()
|
||||
|
||||
# wait 5 socket timeouts before sending
|
||||
msg = random_carstate()
|
||||
start_time = time.monotonic()
|
||||
delayed_send(sock_timeout*5, pub_sock, msg.to_bytes())
|
||||
recvd = messaging.recv_one_retry(sub_sock)
|
||||
assert (time.monotonic() - start_time) >= sock_timeout*5
|
||||
assert isinstance(recvd, capnp._DynamicStructReader)
|
||||
assert_carstate(msg.carState, recvd.carState)
|
||||
@@ -0,0 +1,160 @@
|
||||
import random
|
||||
import time
|
||||
from typing import Sized, cast
|
||||
|
||||
import cereal.messaging as messaging
|
||||
from cereal.messaging.tests.test_messaging import events, random_sock, random_socks, \
|
||||
random_bytes, random_carstate, assert_carstate, \
|
||||
zmq_sleep
|
||||
from cereal.services import SERVICE_LIST
|
||||
|
||||
|
||||
class TestSubMaster:
|
||||
|
||||
def setup_method(self):
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep(3)
|
||||
|
||||
def test_init(self):
|
||||
sm = messaging.SubMaster(events)
|
||||
for p in [sm.updated, sm.recv_time, sm.recv_frame, sm.alive,
|
||||
sm.sock, sm.data, sm.logMonoTime, sm.valid]:
|
||||
assert len(cast(Sized, p)) == len(events)
|
||||
|
||||
def test_init_state(self):
|
||||
socks = random_socks()
|
||||
sm = messaging.SubMaster(socks)
|
||||
assert sm.frame == -1
|
||||
assert not any(sm.updated.values())
|
||||
assert not any(sm.seen.values())
|
||||
on_demand = {s: SERVICE_LIST[s].frequency <= 1e-5 for s in sm.services}
|
||||
assert all(sm.alive[s] == sm.valid[s] == sm.freq_ok[s] == on_demand[s] for s in sm.services)
|
||||
assert all(t == 0. for t in sm.recv_time.values())
|
||||
assert all(f == 0 for f in sm.recv_frame.values())
|
||||
assert all(t == 0 for t in sm.logMonoTime.values())
|
||||
|
||||
for p in [sm.updated, sm.recv_time, sm.recv_frame, sm.alive,
|
||||
sm.sock, sm.data, sm.logMonoTime, sm.valid]:
|
||||
assert len(cast(Sized, p)) == len(socks)
|
||||
|
||||
def test_getitem(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
zmq_sleep()
|
||||
|
||||
msg = random_carstate()
|
||||
pub_sock.send(msg.to_bytes())
|
||||
sm.update(1000)
|
||||
assert_carstate(msg.carState, sm[sock])
|
||||
|
||||
# TODO: break this test up to individually test SubMaster.update and SubMaster.update_msgs
|
||||
def test_update(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
zmq_sleep()
|
||||
|
||||
for i in range(10):
|
||||
msg = messaging.new_message(sock)
|
||||
pub_sock.send(msg.to_bytes())
|
||||
sm.update(1000)
|
||||
assert sm.frame == i
|
||||
assert all(sm.updated.values())
|
||||
|
||||
def test_update_timeout(self):
|
||||
sock = random_sock()
|
||||
sm = messaging.SubMaster([sock,])
|
||||
timeout = random.randrange(1000, 3000)
|
||||
start_time = time.monotonic()
|
||||
sm.update(timeout)
|
||||
t = time.monotonic() - start_time
|
||||
assert t >= timeout/1000.
|
||||
assert t < 3
|
||||
assert not any(sm.updated.values())
|
||||
|
||||
def test_avg_frequency_checks(self):
|
||||
for poll in (True, False):
|
||||
sm = messaging.SubMaster(["modelV2", "carParams", "carState", "cameraOdometry", "liveCalibration"],
|
||||
poll=("modelV2" if poll else None),
|
||||
frequency=(20. if not poll else None))
|
||||
|
||||
checks = {
|
||||
"carState": (20, 20),
|
||||
"modelV2": (20, 20 if poll else 10),
|
||||
"cameraOdometry": (20, 10),
|
||||
"liveCalibration": (4, 4),
|
||||
"carParams": (None, None),
|
||||
"userBookmark": (None, None),
|
||||
}
|
||||
|
||||
for service, (max_freq, min_freq) in checks.items():
|
||||
if max_freq is not None:
|
||||
assert sm._check_avg_freq(service)
|
||||
assert sm.freq_tracker[service].max_freq == max_freq*1.2
|
||||
assert sm.freq_tracker[service].min_freq == min_freq*0.8
|
||||
else:
|
||||
assert not sm._check_avg_freq(service)
|
||||
|
||||
def test_alive(self):
|
||||
pass
|
||||
|
||||
def test_ignore_alive(self):
|
||||
pass
|
||||
|
||||
def test_valid(self):
|
||||
pass
|
||||
|
||||
# SubMaster should always conflate
|
||||
def test_conflate(self):
|
||||
sock = "carState"
|
||||
pub_sock = messaging.pub_sock(sock)
|
||||
sm = messaging.SubMaster([sock,])
|
||||
|
||||
n = 10
|
||||
for i in range(n+1):
|
||||
msg = messaging.new_message(sock)
|
||||
msg.carState.vEgo = i
|
||||
pub_sock.send(msg.to_bytes())
|
||||
time.sleep(0.01)
|
||||
sm.update(1000)
|
||||
assert sm[sock].vEgo == n
|
||||
|
||||
|
||||
class TestPubMaster:
|
||||
|
||||
def setup_method(self):
|
||||
# ZMQ pub socket takes too long to die
|
||||
# sleep to prevent multiple publishers error between tests
|
||||
zmq_sleep(3)
|
||||
|
||||
def test_init(self):
|
||||
messaging.PubMaster(events)
|
||||
|
||||
def test_send(self):
|
||||
socks = random_socks()
|
||||
pm = messaging.PubMaster(socks)
|
||||
sub_socks = {s: messaging.sub_sock(s, conflate=True, timeout=1000) for s in socks}
|
||||
zmq_sleep()
|
||||
|
||||
# PubMaster accepts either a capnp msg builder or bytes
|
||||
for capnp in [True, False]:
|
||||
for i in range(100):
|
||||
sock = socks[i % len(socks)]
|
||||
|
||||
if capnp:
|
||||
try:
|
||||
msg = messaging.new_message(sock)
|
||||
except Exception:
|
||||
msg = messaging.new_message(sock, random.randrange(50))
|
||||
else:
|
||||
msg = random_bytes()
|
||||
|
||||
pm.send(sock, msg)
|
||||
recvd = sub_socks[sock].receive()
|
||||
|
||||
if capnp:
|
||||
msg.clear_write_flag()
|
||||
msg = msg.to_bytes()
|
||||
assert msg == recvd, i
|
||||
@@ -0,0 +1,21 @@
|
||||
import os
|
||||
import tempfile
|
||||
from typing import Dict
|
||||
from parameterized import parameterized
|
||||
|
||||
import cereal.services as services
|
||||
from cereal.services import SERVICE_LIST
|
||||
|
||||
|
||||
class TestServices:
|
||||
|
||||
@parameterized.expand(SERVICE_LIST.keys())
|
||||
def test_services(self, s):
|
||||
service = SERVICE_LIST[s]
|
||||
assert service.frequency <= 104
|
||||
assert service.decimation != 0
|
||||
|
||||
def test_generated_header(self):
|
||||
with tempfile.NamedTemporaryFile(suffix=".h") as f:
|
||||
ret = os.system(f"python3 {services.__file__} > {f.name} && clang++ {f.name} -std=c++11")
|
||||
assert ret == 0, "generated services header is not valid C"
|
||||
@@ -0,0 +1,93 @@
|
||||
/* THIS IS AN AUTOGENERATED FILE, PLEASE EDIT services.py */
|
||||
#ifndef __SERVICES_H
|
||||
#define __SERVICES_H
|
||||
#include <map>
|
||||
#include <string>
|
||||
struct service { std::string name; bool should_log; float frequency; int decimation; };
|
||||
static std::map<std::string, service> services = {
|
||||
{ "gyroscope", {"gyroscope", true, 104.000000, 104}},
|
||||
{ "gyroscope2", {"gyroscope2", true, 100.000000, 100}},
|
||||
{ "accelerometer", {"accelerometer", true, 104.000000, 104}},
|
||||
{ "accelerometer2", {"accelerometer2", true, 100.000000, 100}},
|
||||
{ "magnetometer", {"magnetometer", true, 25.000000, -1}},
|
||||
{ "lightSensor", {"lightSensor", true, 100.000000, 100}},
|
||||
{ "temperatureSensor", {"temperatureSensor", true, 2.000000, 200}},
|
||||
{ "temperatureSensor2", {"temperatureSensor2", true, 2.000000, 200}},
|
||||
{ "gpsNMEA", {"gpsNMEA", true, 9.000000, -1}},
|
||||
{ "deviceState", {"deviceState", true, 2.000000, 1}},
|
||||
{ "touch", {"touch", true, 20.000000, 1}},
|
||||
{ "can", {"can", true, 100.000000, 2053}},
|
||||
{ "controlsState", {"controlsState", true, 100.000000, 10}},
|
||||
{ "selfdriveState", {"selfdriveState", true, 100.000000, 10}},
|
||||
{ "pandaStates", {"pandaStates", true, 10.000000, 1}},
|
||||
{ "peripheralState", {"peripheralState", true, 2.000000, 1}},
|
||||
{ "radarState", {"radarState", true, 20.000000, 5}},
|
||||
{ "roadEncodeIdx", {"roadEncodeIdx", false, 20.000000, 1}},
|
||||
{ "liveTracks", {"liveTracks", true, 20.000000, -1}},
|
||||
{ "sendcan", {"sendcan", true, 100.000000, 139}},
|
||||
{ "logMessage", {"logMessage", true, 0.000000, -1}},
|
||||
{ "errorLogMessage", {"errorLogMessage", true, 0.000000, 1}},
|
||||
{ "liveCalibration", {"liveCalibration", true, 4.000000, 4}},
|
||||
{ "liveTorqueParameters", {"liveTorqueParameters", true, 4.000000, 1}},
|
||||
{ "liveDelay", {"liveDelay", true, 4.000000, 1}},
|
||||
{ "androidLog", {"androidLog", true, 0.000000, -1}},
|
||||
{ "carState", {"carState", true, 100.000000, 10}},
|
||||
{ "carControl", {"carControl", true, 100.000000, 10}},
|
||||
{ "carOutput", {"carOutput", true, 100.000000, 10}},
|
||||
{ "longitudinalPlan", {"longitudinalPlan", true, 20.000000, 10}},
|
||||
{ "driverAssistance", {"driverAssistance", true, 20.000000, 20}},
|
||||
{ "procLog", {"procLog", true, 0.500000, 15}},
|
||||
{ "gpsLocationExternal", {"gpsLocationExternal", true, 10.000000, 10}},
|
||||
{ "gpsLocation", {"gpsLocation", true, 1.000000, 1}},
|
||||
{ "ubloxGnss", {"ubloxGnss", true, 10.000000, -1}},
|
||||
{ "qcomGnss", {"qcomGnss", true, 2.000000, -1}},
|
||||
{ "gnssMeasurements", {"gnssMeasurements", true, 10.000000, 10}},
|
||||
{ "clocks", {"clocks", true, 0.100000, 1}},
|
||||
{ "ubloxRaw", {"ubloxRaw", true, 20.000000, -1}},
|
||||
{ "livePose", {"livePose", true, 20.000000, 4}},
|
||||
{ "liveParameters", {"liveParameters", true, 20.000000, 5}},
|
||||
{ "cameraOdometry", {"cameraOdometry", true, 20.000000, 10}},
|
||||
{ "thumbnail", {"thumbnail", true, 0.016667, 1}},
|
||||
{ "onroadEvents", {"onroadEvents", true, 1.000000, 1}},
|
||||
{ "carParams", {"carParams", true, 0.020000, 1}},
|
||||
{ "roadCameraState", {"roadCameraState", true, 20.000000, 20}},
|
||||
{ "driverCameraState", {"driverCameraState", true, 20.000000, 20}},
|
||||
{ "driverEncodeIdx", {"driverEncodeIdx", false, 20.000000, 1}},
|
||||
{ "driverStateV2", {"driverStateV2", true, 20.000000, 10}},
|
||||
{ "driverMonitoringState", {"driverMonitoringState", true, 20.000000, 10}},
|
||||
{ "wideRoadEncodeIdx", {"wideRoadEncodeIdx", false, 20.000000, 1}},
|
||||
{ "wideRoadCameraState", {"wideRoadCameraState", true, 20.000000, 20}},
|
||||
{ "drivingModelData", {"drivingModelData", true, 20.000000, 10}},
|
||||
{ "modelV2", {"modelV2", true, 20.000000, -1}},
|
||||
{ "managerState", {"managerState", true, 2.000000, 1}},
|
||||
{ "uploaderState", {"uploaderState", true, 0.000000, 1}},
|
||||
{ "navInstruction", {"navInstruction", true, 1.000000, 10}},
|
||||
{ "navRoute", {"navRoute", true, 0.000000, -1}},
|
||||
{ "navThumbnail", {"navThumbnail", true, 0.000000, -1}},
|
||||
{ "qRoadEncodeIdx", {"qRoadEncodeIdx", false, 20.000000, -1}},
|
||||
{ "userBookmark", {"userBookmark", true, 0.000000, 1}},
|
||||
{ "soundPressure", {"soundPressure", true, 10.000000, 10}},
|
||||
{ "rawAudioData", {"rawAudioData", false, 20.000000, -1}},
|
||||
{ "bookmarkButton", {"bookmarkButton", true, 0.000000, 1}},
|
||||
{ "audioFeedback", {"audioFeedback", true, 0.000000, 1}},
|
||||
{ "uiDebug", {"uiDebug", true, 0.000000, 1}},
|
||||
{ "testJoystick", {"testJoystick", true, 0.000000, -1}},
|
||||
{ "alertDebug", {"alertDebug", true, 20.000000, 5}},
|
||||
{ "roadEncodeData", {"roadEncodeData", false, 20.000000, -1}},
|
||||
{ "driverEncodeData", {"driverEncodeData", false, 20.000000, -1}},
|
||||
{ "wideRoadEncodeData", {"wideRoadEncodeData", false, 20.000000, -1}},
|
||||
{ "qRoadEncodeData", {"qRoadEncodeData", false, 20.000000, -1}},
|
||||
{ "livestreamWideRoadEncodeIdx", {"livestreamWideRoadEncodeIdx", false, 20.000000, -1}},
|
||||
{ "livestreamRoadEncodeIdx", {"livestreamRoadEncodeIdx", false, 20.000000, -1}},
|
||||
{ "livestreamDriverEncodeIdx", {"livestreamDriverEncodeIdx", false, 20.000000, -1}},
|
||||
{ "livestreamWideRoadEncodeData", {"livestreamWideRoadEncodeData", false, 20.000000, -1}},
|
||||
{ "livestreamRoadEncodeData", {"livestreamRoadEncodeData", false, 20.000000, -1}},
|
||||
{ "livestreamDriverEncodeData", {"livestreamDriverEncodeData", false, 20.000000, -1}},
|
||||
{ "customReservedRawData0", {"customReservedRawData0", true, 0.000000, -1}},
|
||||
{ "customReservedRawData1", {"customReservedRawData1", true, 0.000000, -1}},
|
||||
{ "customReservedRawData2", {"customReservedRawData2", true, 0.000000, -1}},
|
||||
{ "dpControlsState", {"dpControlsState", false, 100.000000, 10}},
|
||||
{ "modelExt", {"modelExt", true, 20.000000, -1}},
|
||||
};
|
||||
#endif
|
||||
|
||||
Executable
+128
@@ -0,0 +1,128 @@
|
||||
#!/usr/bin/env python3
|
||||
from typing import Optional
|
||||
|
||||
|
||||
class Service:
|
||||
def __init__(self, should_log: bool, frequency: float, decimation: Optional[int] = None):
|
||||
self.should_log = should_log
|
||||
self.frequency = frequency
|
||||
self.decimation = decimation
|
||||
|
||||
|
||||
_services: dict[str, tuple] = {
|
||||
# service: (should_log, frequency, qlog decimation (optional))
|
||||
# note: the "EncodeIdx" packets will still be in the log
|
||||
"gyroscope": (True, 104., 104),
|
||||
"gyroscope2": (True, 100., 100),
|
||||
"accelerometer": (True, 104., 104),
|
||||
"accelerometer2": (True, 100., 100),
|
||||
"magnetometer": (True, 25.),
|
||||
"lightSensor": (True, 100., 100),
|
||||
"temperatureSensor": (True, 2., 200),
|
||||
"temperatureSensor2": (True, 2., 200),
|
||||
"gpsNMEA": (True, 9.),
|
||||
"deviceState": (True, 2., 1),
|
||||
"touch": (True, 20., 1),
|
||||
"can": (True, 100., 2053), # decimation gives ~3 msgs in a full segment
|
||||
"controlsState": (True, 100., 10),
|
||||
"selfdriveState": (True, 100., 10),
|
||||
"pandaStates": (True, 10., 1),
|
||||
"peripheralState": (True, 2., 1),
|
||||
"radarState": (True, 20., 5),
|
||||
"roadEncodeIdx": (False, 20., 1),
|
||||
"liveTracks": (True, 20.),
|
||||
"sendcan": (True, 100., 139),
|
||||
"logMessage": (True, 0.),
|
||||
"errorLogMessage": (True, 0., 1),
|
||||
"liveCalibration": (True, 4., 4),
|
||||
"liveTorqueParameters": (True, 4., 1),
|
||||
"liveDelay": (True, 4., 1),
|
||||
"androidLog": (True, 0.),
|
||||
"carState": (True, 100., 10),
|
||||
"carControl": (True, 100., 10),
|
||||
"carOutput": (True, 100., 10),
|
||||
"longitudinalPlan": (True, 20., 10),
|
||||
"driverAssistance": (True, 20., 20),
|
||||
"procLog": (True, 0.5, 15),
|
||||
"gpsLocationExternal": (True, 10., 10),
|
||||
"gpsLocation": (True, 1., 1),
|
||||
"ubloxGnss": (True, 10.),
|
||||
"qcomGnss": (True, 2.),
|
||||
"gnssMeasurements": (True, 10., 10),
|
||||
"clocks": (True, 0.1, 1),
|
||||
"ubloxRaw": (True, 20.),
|
||||
"livePose": (True, 20., 4),
|
||||
"liveParameters": (True, 20., 5),
|
||||
"cameraOdometry": (True, 20., 10),
|
||||
"thumbnail": (True, 1 / 60., 1),
|
||||
"onroadEvents": (True, 1., 1),
|
||||
"carParams": (True, 0.02, 1),
|
||||
"roadCameraState": (True, 20., 20),
|
||||
"driverCameraState": (True, 20., 20),
|
||||
"driverEncodeIdx": (False, 20., 1),
|
||||
"driverStateV2": (True, 20., 10),
|
||||
"driverMonitoringState": (True, 20., 10),
|
||||
"wideRoadEncodeIdx": (False, 20., 1),
|
||||
"wideRoadCameraState": (True, 20., 20),
|
||||
"drivingModelData": (True, 20., 10),
|
||||
"modelV2": (True, 20.),
|
||||
"managerState": (True, 2., 1),
|
||||
"uploaderState": (True, 0., 1),
|
||||
"navInstruction": (True, 1., 10),
|
||||
"navRoute": (True, 0.),
|
||||
"navThumbnail": (True, 0.),
|
||||
"qRoadEncodeIdx": (False, 20.),
|
||||
"userBookmark": (True, 0., 1),
|
||||
"soundPressure": (True, 10., 10),
|
||||
"rawAudioData": (False, 20.),
|
||||
"bookmarkButton": (True, 0., 1),
|
||||
"audioFeedback": (True, 0., 1),
|
||||
|
||||
# debug
|
||||
"uiDebug": (True, 0., 1),
|
||||
"testJoystick": (True, 0.),
|
||||
"alertDebug": (True, 20., 5),
|
||||
"roadEncodeData": (False, 20.),
|
||||
"driverEncodeData": (False, 20.),
|
||||
"wideRoadEncodeData": (False, 20.),
|
||||
"qRoadEncodeData": (False, 20.),
|
||||
"livestreamWideRoadEncodeIdx": (False, 20.),
|
||||
"livestreamRoadEncodeIdx": (False, 20.),
|
||||
"livestreamDriverEncodeIdx": (False, 20.),
|
||||
"livestreamWideRoadEncodeData": (False, 20.),
|
||||
"livestreamRoadEncodeData": (False, 20.),
|
||||
"livestreamDriverEncodeData": (False, 20.),
|
||||
"customReservedRawData0": (True, 0.),
|
||||
"customReservedRawData1": (True, 0.),
|
||||
"customReservedRawData2": (True, 0.),
|
||||
"dpControlsState": (False, 100., 10),
|
||||
"modelExt": (True, 20.),
|
||||
}
|
||||
SERVICE_LIST = {name: Service(*vals) for
|
||||
idx, (name, vals) in enumerate(_services.items())}
|
||||
|
||||
|
||||
def build_header():
|
||||
h = ""
|
||||
h += "/* THIS IS AN AUTOGENERATED FILE, PLEASE EDIT services.py */\n"
|
||||
h += "#ifndef __SERVICES_H\n"
|
||||
h += "#define __SERVICES_H\n"
|
||||
|
||||
h += "#include <map>\n"
|
||||
h += "#include <string>\n"
|
||||
|
||||
h += "struct service { std::string name; bool should_log; float frequency; int decimation; };\n"
|
||||
h += "static std::map<std::string, service> services = {\n"
|
||||
for k, v in SERVICE_LIST.items():
|
||||
should_log = "true" if v.should_log else "false"
|
||||
decimation = -1 if v.decimation is None else v.decimation
|
||||
h += ' { "%s", {"%s", %s, %f, %d}},\n' % \
|
||||
(k, k, should_log, v.frequency, decimation)
|
||||
h += "};\n"
|
||||
|
||||
h += "#endif\n"
|
||||
return h
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
print(build_header())
|
||||
@@ -0,0 +1 @@
|
||||
*.cpp
|
||||
@@ -0,0 +1,29 @@
|
||||
Import('env', 'envCython', 'arch')
|
||||
|
||||
common_libs = [
|
||||
'params.cc',
|
||||
'swaglog.cc',
|
||||
'util.cc',
|
||||
'ratekeeper.cc',
|
||||
'clutil.cc',
|
||||
]
|
||||
|
||||
_common = env.Library('common', common_libs, LIBS="json11")
|
||||
Export('_common')
|
||||
|
||||
if GetOption('extras'):
|
||||
env.Program('tests/test_common',
|
||||
['tests/test_runner.cc', 'tests/test_params.cc', 'tests/test_util.cc', 'tests/test_swaglog.cc'],
|
||||
LIBS=[_common, 'json11', 'zmq', 'pthread'])
|
||||
|
||||
# Cython bindings
|
||||
params_python = envCython.Program('params_pyx.so', 'params_pyx.pyx', LIBS=envCython['LIBS'] + [_common, 'zmq', 'json11'])
|
||||
|
||||
SConscript([
|
||||
'transformations/SConscript',
|
||||
])
|
||||
|
||||
Import('transformations_python')
|
||||
common_python = [params_python, transformations_python]
|
||||
|
||||
Export('common_python')
|
||||
@@ -0,0 +1,58 @@
|
||||
import jwt
|
||||
import os
|
||||
import requests
|
||||
from datetime import datetime, timedelta, UTC
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
from openpilot.system.version import get_version
|
||||
|
||||
API_HOST = os.getenv('API_HOST', 'https://api.commadotai.com')
|
||||
|
||||
# name : jwt signature algorithm
|
||||
KEYS = {"id_rsa" : "RS256",
|
||||
"id_ecdsa" : "ES256"}
|
||||
|
||||
class Api:
|
||||
def __init__(self, dongle_id):
|
||||
self.dongle_id = dongle_id
|
||||
self.jwt_algorithm, self.private_key, _ = get_key_pair()
|
||||
|
||||
def get(self, *args, **kwargs):
|
||||
return self.request('GET', *args, **kwargs)
|
||||
|
||||
def post(self, *args, **kwargs):
|
||||
return self.request('POST', *args, **kwargs)
|
||||
|
||||
def request(self, method, endpoint, timeout=None, access_token=None, **params):
|
||||
return api_get(endpoint, method=method, timeout=timeout, access_token=access_token, **params)
|
||||
|
||||
def get_token(self, payload_extra=None, expiry_hours=1):
|
||||
now = datetime.now(UTC).replace(tzinfo=None)
|
||||
payload = {
|
||||
'identity': self.dongle_id,
|
||||
'nbf': now,
|
||||
'iat': now,
|
||||
'exp': now + timedelta(hours=expiry_hours)
|
||||
}
|
||||
if payload_extra is not None:
|
||||
payload.update(payload_extra)
|
||||
token = jwt.encode(payload, self.private_key, algorithm=self.jwt_algorithm)
|
||||
if isinstance(token, bytes):
|
||||
token = token.decode('utf8')
|
||||
return token
|
||||
|
||||
|
||||
def api_get(endpoint, method='GET', timeout=None, access_token=None, **params):
|
||||
headers = {}
|
||||
if access_token is not None:
|
||||
headers['Authorization'] = "JWT " + access_token
|
||||
|
||||
headers['User-Agent'] = "openpilot-" + get_version()
|
||||
|
||||
return requests.request(method, API_HOST + "/" + endpoint, timeout=timeout, headers=headers, params=params)
|
||||
|
||||
def get_key_pair():
|
||||
for key in KEYS:
|
||||
if os.path.isfile(Paths.persist_root() + f'/comma/{key}') and os.path.isfile(Paths.persist_root() + f'/comma/{key}.pub'):
|
||||
with open(Paths.persist_root() + f'/comma/{key}') as private, open(Paths.persist_root() + f'/comma/{key}.pub') as public:
|
||||
return KEYS[key], private.read(), public.read()
|
||||
return None, None, None
|
||||
@@ -0,0 +1,4 @@
|
||||
import os
|
||||
|
||||
|
||||
BASEDIR = os.path.abspath(os.path.join(os.path.dirname(os.path.realpath(__file__)), "../"))
|
||||
@@ -0,0 +1,28 @@
|
||||
#pragma once
|
||||
|
||||
#ifdef __APPLE__
|
||||
#include <OpenCL/cl.h>
|
||||
#else
|
||||
#include <CL/cl.h>
|
||||
#endif
|
||||
|
||||
#include <string>
|
||||
|
||||
#define CL_CHECK(_expr) \
|
||||
do { \
|
||||
assert(CL_SUCCESS == (_expr)); \
|
||||
} while (0)
|
||||
|
||||
#define CL_CHECK_ERR(_expr) \
|
||||
({ \
|
||||
cl_int err = CL_INVALID_VALUE; \
|
||||
__typeof__(_expr) _ret = _expr; \
|
||||
assert(_ret&& err == CL_SUCCESS); \
|
||||
_ret; \
|
||||
})
|
||||
|
||||
cl_device_id cl_get_device_id(cl_device_type device_type);
|
||||
cl_context cl_create_context(cl_device_id device_id);
|
||||
void cl_release_context(cl_context context);
|
||||
cl_program cl_program_from_source(cl_context ctx, cl_device_id device_id, const std::string& src, const char* args = nullptr);
|
||||
cl_program cl_program_from_file(cl_context ctx, cl_device_id device_id, const char* path, const char* args);
|
||||
@@ -0,0 +1,23 @@
|
||||
import numpy as np
|
||||
|
||||
# conversions
|
||||
class CV:
|
||||
# Speed
|
||||
MPH_TO_KPH = 1.609344
|
||||
KPH_TO_MPH = 1. / MPH_TO_KPH
|
||||
MS_TO_KPH = 3.6
|
||||
KPH_TO_MS = 1. / MS_TO_KPH
|
||||
MS_TO_MPH = MS_TO_KPH * KPH_TO_MPH
|
||||
MPH_TO_MS = MPH_TO_KPH * KPH_TO_MS
|
||||
MS_TO_KNOTS = 1.9438
|
||||
KNOTS_TO_MS = 1. / MS_TO_KNOTS
|
||||
|
||||
# Angle
|
||||
DEG_TO_RAD = np.pi / 180.
|
||||
RAD_TO_DEG = 1. / DEG_TO_RAD
|
||||
|
||||
# Mass
|
||||
LB_TO_KG = 0.453592
|
||||
|
||||
|
||||
ACCELERATION_DUE_TO_GRAVITY = 9.81 # m/s^2
|
||||
@@ -0,0 +1,34 @@
|
||||
class FirstOrderFilter:
|
||||
def __init__(self, x0, rc, dt, initialized=True):
|
||||
self.x = x0
|
||||
self.dt = dt
|
||||
self.update_alpha(rc)
|
||||
self.initialized = initialized
|
||||
|
||||
def update_alpha(self, rc):
|
||||
self.alpha = self.dt / (rc + self.dt)
|
||||
|
||||
def update(self, x):
|
||||
if self.initialized:
|
||||
self.x = (1. - self.alpha) * self.x + self.alpha * x
|
||||
else:
|
||||
self.initialized = True
|
||||
self.x = x
|
||||
return self.x
|
||||
|
||||
|
||||
class BounceFilter(FirstOrderFilter):
|
||||
def __init__(self, x0, rc, dt, initialized=True, bounce=2):
|
||||
self.velocity = FirstOrderFilter(0.0, 0.15, dt)
|
||||
self.bounce = bounce
|
||||
super().__init__(x0, rc, dt, initialized)
|
||||
|
||||
def update(self, x):
|
||||
super().update(x)
|
||||
scale = self.dt / (1.0 / 60.0) # tuned at 60 fps
|
||||
self.velocity.x += (x - self.x) * self.bounce * scale * self.dt
|
||||
self.velocity.update(0.0)
|
||||
if abs(self.velocity.x) < 1e-5:
|
||||
self.velocity.x = 0.0
|
||||
self.x += self.velocity.x
|
||||
return self.x
|
||||
@@ -0,0 +1,42 @@
|
||||
from functools import cache
|
||||
import subprocess
|
||||
from openpilot.common.utils import run_cmd, run_cmd_default
|
||||
|
||||
|
||||
@cache
|
||||
def get_commit(cwd: str = None, branch: str = "HEAD") -> str:
|
||||
return run_cmd_default(["git", "rev-parse", branch], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_commit_date(cwd: str = None, commit: str = "HEAD") -> str:
|
||||
return run_cmd_default(["git", "show", "--no-patch", "--format='%ct %ci'", commit], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_short_branch(cwd: str = None) -> str:
|
||||
return run_cmd_default(["git", "rev-parse", "--abbrev-ref", "HEAD"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_branch(cwd: str = None) -> str:
|
||||
return run_cmd_default(["git", "rev-parse", "--abbrev-ref", "--symbolic-full-name", "@{u}"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_origin(cwd: str = None) -> str:
|
||||
try:
|
||||
local_branch = run_cmd(["git", "name-rev", "--name-only", "HEAD"], cwd=cwd)
|
||||
tracking_remote = run_cmd(["git", "config", "branch." + local_branch + ".remote"], cwd=cwd)
|
||||
return run_cmd(["git", "config", "remote." + tracking_remote + ".url"], cwd=cwd)
|
||||
except subprocess.CalledProcessError: # Not on a branch, fallback
|
||||
return run_cmd_default(["git", "config", "--get", "remote.origin.url"], cwd=cwd)
|
||||
|
||||
|
||||
@cache
|
||||
def get_normalized_origin(cwd: str = None) -> str:
|
||||
return get_origin(cwd) \
|
||||
.replace("git@", "", 1) \
|
||||
.replace(".git", "", 1) \
|
||||
.replace("https://", "", 1) \
|
||||
.replace(":", "/", 1)
|
||||
@@ -0,0 +1,89 @@
|
||||
import os
|
||||
import fcntl
|
||||
import ctypes
|
||||
from functools import cache
|
||||
|
||||
def gpio_init(pin: int, output: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/direction", 'wb') as f:
|
||||
f.write(b"out" if output else b"in")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} direction: {e}")
|
||||
|
||||
def gpio_set(pin: int, high: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'wb') as f:
|
||||
f.write(b"1" if high else b"0")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
def gpio_read(pin: int) -> bool | None:
|
||||
val = None
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'rb') as f:
|
||||
val = bool(int(f.read().strip()))
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
return val
|
||||
|
||||
def gpio_export(pin: int) -> None:
|
||||
if os.path.isdir(f"/sys/class/gpio/gpio{pin}"):
|
||||
return
|
||||
|
||||
try:
|
||||
with open("/sys/class/gpio/export", 'w') as f:
|
||||
f.write(str(pin))
|
||||
except Exception:
|
||||
print(f"Failed to export gpio {pin}")
|
||||
|
||||
@cache
|
||||
def get_irq_action(irq: int) -> list[str]:
|
||||
try:
|
||||
with open(f"/sys/kernel/irq/{irq}/actions") as f:
|
||||
actions = f.read().strip().split(',')
|
||||
return actions
|
||||
except FileNotFoundError:
|
||||
return []
|
||||
|
||||
def get_irqs_for_action(action: str) -> list[str]:
|
||||
ret = []
|
||||
with open("/proc/interrupts") as f:
|
||||
for l in f.readlines():
|
||||
irq = l.split(':')[0].strip()
|
||||
if irq.isdigit() and action in get_irq_action(irq):
|
||||
ret.append(irq)
|
||||
return ret
|
||||
|
||||
# *** gpiochip ***
|
||||
|
||||
class gpioevent_data(ctypes.Structure):
|
||||
_fields_ = [
|
||||
("timestamp", ctypes.c_uint64),
|
||||
("id", ctypes.c_uint32),
|
||||
]
|
||||
|
||||
class gpioevent_request(ctypes.Structure):
|
||||
_fields_ = [
|
||||
("lineoffset", ctypes.c_uint32),
|
||||
("handleflags", ctypes.c_uint32),
|
||||
("eventflags", ctypes.c_uint32),
|
||||
("label", ctypes.c_char * 32),
|
||||
("fd", ctypes.c_int)
|
||||
]
|
||||
|
||||
def gpiochip_get_ro_value_fd(label: str, gpiochip_id: int, pin: int) -> int:
|
||||
GPIOEVENT_REQUEST_BOTH_EDGES = 0x3
|
||||
GPIOHANDLE_REQUEST_INPUT = 0x1
|
||||
GPIO_GET_LINEEVENT_IOCTL = 0xc030b404
|
||||
|
||||
rq = gpioevent_request()
|
||||
rq.lineoffset = pin
|
||||
rq.handleflags = GPIOHANDLE_REQUEST_INPUT
|
||||
rq.eventflags = GPIOEVENT_REQUEST_BOTH_EDGES
|
||||
rq.label = label.encode('utf-8')[:31] + b'\0'
|
||||
|
||||
fd = os.open(f"/dev/gpiochip{gpiochip_id}", os.O_RDONLY)
|
||||
fcntl.ioctl(fd, GPIO_GET_LINEEVENT_IOCTL, rq)
|
||||
os.close(fd)
|
||||
return int(rq.fd)
|
||||
@@ -0,0 +1,8 @@
|
||||
from openpilot.common.params import Params
|
||||
|
||||
|
||||
def get_gps_location_service(params: Params) -> str:
|
||||
if params.get_bool("UbloxAvailable"):
|
||||
return "gpsLocationExternal"
|
||||
else:
|
||||
return "gpsLocation"
|
||||
@@ -0,0 +1,249 @@
|
||||
import io
|
||||
import os
|
||||
import sys
|
||||
import copy
|
||||
import json
|
||||
import time
|
||||
import uuid
|
||||
import socket
|
||||
import logging
|
||||
import traceback
|
||||
import numpy as np
|
||||
from threading import local
|
||||
from collections import OrderedDict
|
||||
from contextlib import contextmanager
|
||||
|
||||
LOG_TIMESTAMPS = "LOG_TIMESTAMPS" in os.environ
|
||||
|
||||
def json_handler(obj):
|
||||
if isinstance(obj, np.bool_):
|
||||
return bool(obj)
|
||||
# if isinstance(obj, (datetime.date, datetime.time)):
|
||||
# return obj.isoformat()
|
||||
return repr(obj)
|
||||
|
||||
def json_robust_dumps(obj):
|
||||
return json.dumps(obj, default=json_handler)
|
||||
|
||||
class NiceOrderedDict(OrderedDict):
|
||||
def __str__(self):
|
||||
return json_robust_dumps(self)
|
||||
|
||||
class SwagFormatter(logging.Formatter):
|
||||
def __init__(self, swaglogger):
|
||||
logging.Formatter.__init__(self, None, '%a %b %d %H:%M:%S %Z %Y')
|
||||
|
||||
self.swaglogger = swaglogger
|
||||
self.host = socket.gethostname()
|
||||
|
||||
def format_dict(self, record):
|
||||
record_dict = NiceOrderedDict()
|
||||
|
||||
if isinstance(record.msg, dict):
|
||||
record_dict['msg'] = record.msg
|
||||
else:
|
||||
try:
|
||||
record_dict['msg'] = record.getMessage()
|
||||
except (ValueError, TypeError):
|
||||
record_dict['msg'] = [record.msg]+record.args
|
||||
|
||||
record_dict['ctx'] = self.swaglogger.get_ctx()
|
||||
|
||||
if record.exc_info:
|
||||
record_dict['exc_info'] = self.formatException(record.exc_info)
|
||||
|
||||
record_dict['level'] = record.levelname
|
||||
record_dict['levelnum'] = record.levelno
|
||||
record_dict['name'] = record.name
|
||||
record_dict['filename'] = record.filename
|
||||
record_dict['lineno'] = record.lineno
|
||||
record_dict['pathname'] = record.pathname
|
||||
record_dict['module'] = record.module
|
||||
record_dict['funcName'] = record.funcName
|
||||
record_dict['host'] = self.host
|
||||
record_dict['process'] = record.process
|
||||
record_dict['thread'] = record.thread
|
||||
record_dict['threadName'] = record.threadName
|
||||
record_dict['created'] = record.created
|
||||
|
||||
return record_dict
|
||||
|
||||
def format(self, record):
|
||||
if self.swaglogger is None:
|
||||
raise Exception("must set swaglogger before calling format()")
|
||||
return json_robust_dumps(self.format_dict(record))
|
||||
|
||||
class SwagLogFileFormatter(SwagFormatter):
|
||||
def fix_kv(self, k, v):
|
||||
# append type to names to preserve legacy naming in logs
|
||||
# avoids overlapping key namespaces with different types
|
||||
# e.g. log.info() creates 'msg' -> 'msg$s'
|
||||
# log.event() creates 'msg.health.logMonoTime' -> 'msg.health.logMonoTime$i'
|
||||
# because overlapping namespace 'msg' caused problems
|
||||
if isinstance(v, (str, bytes)):
|
||||
k += "$s"
|
||||
elif isinstance(v, float):
|
||||
k += "$f"
|
||||
elif isinstance(v, bool):
|
||||
k += "$b"
|
||||
elif isinstance(v, int):
|
||||
k += "$i"
|
||||
elif isinstance(v, dict):
|
||||
nv = {}
|
||||
for ik, iv in v.items():
|
||||
ik, iv = self.fix_kv(ik, iv)
|
||||
nv[ik] = iv
|
||||
v = nv
|
||||
elif isinstance(v, list):
|
||||
k += "$a"
|
||||
return k, v
|
||||
|
||||
def format(self, record):
|
||||
if isinstance(record, str):
|
||||
v = json.loads(record)
|
||||
else:
|
||||
v = self.format_dict(record)
|
||||
|
||||
mk, mv = self.fix_kv('msg', v['msg'])
|
||||
del v['msg']
|
||||
v[mk] = mv
|
||||
v['id'] = uuid.uuid4().hex
|
||||
|
||||
return json_robust_dumps(v)
|
||||
|
||||
class SwagErrorFilter(logging.Filter):
|
||||
def filter(self, record):
|
||||
return record.levelno < logging.ERROR
|
||||
|
||||
def _tmpfunc():
|
||||
return 0
|
||||
|
||||
def _srcfile():
|
||||
return os.path.normcase(_tmpfunc.__code__.co_filename)
|
||||
|
||||
class SwagLogger(logging.Logger):
|
||||
def __init__(self):
|
||||
logging.Logger.__init__(self, "swaglog")
|
||||
|
||||
self.global_ctx = {}
|
||||
|
||||
self.log_local = local()
|
||||
self.log_local.ctx = {}
|
||||
|
||||
def local_ctx(self):
|
||||
try:
|
||||
return self.log_local.ctx
|
||||
except AttributeError:
|
||||
self.log_local.ctx = {}
|
||||
return self.log_local.ctx
|
||||
|
||||
def get_ctx(self):
|
||||
return dict(self.local_ctx(), **self.global_ctx)
|
||||
|
||||
@contextmanager
|
||||
def ctx(self, **kwargs):
|
||||
old_ctx = self.local_ctx()
|
||||
self.log_local.ctx = copy.copy(old_ctx) or {}
|
||||
self.log_local.ctx.update(kwargs)
|
||||
try:
|
||||
yield
|
||||
finally:
|
||||
self.log_local.ctx = old_ctx
|
||||
|
||||
def bind(self, **kwargs):
|
||||
self.local_ctx().update(kwargs)
|
||||
|
||||
def bind_global(self, **kwargs):
|
||||
self.global_ctx.update(kwargs)
|
||||
|
||||
def event(self, event, *args, **kwargs):
|
||||
evt = NiceOrderedDict()
|
||||
evt['event'] = event
|
||||
if args:
|
||||
evt['args'] = args
|
||||
evt.update(kwargs)
|
||||
if 'error' in kwargs:
|
||||
self.error(evt)
|
||||
elif 'debug' in kwargs:
|
||||
self.debug(evt)
|
||||
else:
|
||||
self.info(evt)
|
||||
|
||||
def timestamp(self, event_name):
|
||||
if LOG_TIMESTAMPS:
|
||||
t = time.monotonic()
|
||||
tstp = NiceOrderedDict()
|
||||
tstp['timestamp'] = NiceOrderedDict()
|
||||
tstp['timestamp']["event"] = event_name
|
||||
tstp['timestamp']["time"] = t*1e9
|
||||
self.debug(tstp)
|
||||
|
||||
def findCaller(self, stack_info=False, stacklevel=1):
|
||||
"""
|
||||
Find the stack frame of the caller so that we can note the source
|
||||
file name, line number and function name.
|
||||
"""
|
||||
f = sys._getframe(3)
|
||||
#On some versions of IronPython, currentframe() returns None if
|
||||
#IronPython isn't run with -X:Frames.
|
||||
if f is not None:
|
||||
f = f.f_back
|
||||
orig_f = f
|
||||
while f and stacklevel > 1:
|
||||
f = f.f_back
|
||||
stacklevel -= 1
|
||||
if not f:
|
||||
f = orig_f
|
||||
rv = "(unknown file)", 0, "(unknown function)", None
|
||||
while hasattr(f, "f_code"):
|
||||
co = f.f_code
|
||||
filename = os.path.normcase(co.co_filename)
|
||||
|
||||
if filename == _srcfile:
|
||||
f = f.f_back
|
||||
continue
|
||||
sinfo = None
|
||||
if stack_info:
|
||||
sio = io.StringIO()
|
||||
sio.write('Stack (most recent call last):\n')
|
||||
traceback.print_stack(f, file=sio)
|
||||
sinfo = sio.getvalue()
|
||||
if sinfo[-1] == '\n':
|
||||
sinfo = sinfo[:-1]
|
||||
sio.close()
|
||||
rv = (co.co_filename, f.f_lineno, co.co_name, sinfo)
|
||||
break
|
||||
return rv
|
||||
|
||||
if __name__ == "__main__":
|
||||
log = SwagLogger()
|
||||
|
||||
stdout_handler = logging.StreamHandler(sys.stdout)
|
||||
stdout_handler.setLevel(logging.INFO)
|
||||
stdout_handler.addFilter(SwagErrorFilter())
|
||||
log.addHandler(stdout_handler)
|
||||
|
||||
stderr_handler = logging.StreamHandler(sys.stderr)
|
||||
stderr_handler.setLevel(logging.ERROR)
|
||||
log.addHandler(stderr_handler)
|
||||
|
||||
log.info("asdasd %s", "a")
|
||||
log.info({'wut': 1})
|
||||
log.warning("warning")
|
||||
log.error("error")
|
||||
log.critical("critical")
|
||||
log.event("test", x="y")
|
||||
|
||||
with log.ctx():
|
||||
stdout_handler.setFormatter(SwagFormatter(log))
|
||||
stderr_handler.setFormatter(SwagFormatter(log))
|
||||
log.bind(user="some user")
|
||||
log.info("in req")
|
||||
print("")
|
||||
log.warning("warning")
|
||||
print("")
|
||||
log.error("error")
|
||||
print("")
|
||||
log.critical("critical")
|
||||
print("")
|
||||
log.event("do_req", a=1, b="c")
|
||||
@@ -0,0 +1,45 @@
|
||||
HTML_REPLACEMENTS = [
|
||||
(r'&', r'&'),
|
||||
(r'"', r'"'),
|
||||
]
|
||||
|
||||
def parse_markdown(text: str, tab_length: int = 2) -> str:
|
||||
lines = text.split("\n")
|
||||
output: list[str] = []
|
||||
list_level = 0
|
||||
|
||||
def end_outstanding_lists(level: int, end_level: int) -> int:
|
||||
while level > end_level:
|
||||
level -= 1
|
||||
output.append("</ul>")
|
||||
if level > 0:
|
||||
output.append("</li>")
|
||||
return end_level
|
||||
|
||||
for i, line in enumerate(lines):
|
||||
if i + 1 < len(lines) and lines[i + 1].startswith("==="): # heading
|
||||
output.append(f"<h1>{line}</h1>")
|
||||
elif line.startswith("==="):
|
||||
pass
|
||||
elif line.lstrip().startswith("* "): # list
|
||||
line_level = 1 + line.count(" " * tab_length, 0, line.index("*"))
|
||||
if list_level >= line_level:
|
||||
list_level = end_outstanding_lists(list_level, line_level)
|
||||
else:
|
||||
list_level += 1
|
||||
if list_level > 1:
|
||||
output[-1] = output[-1].replace("</li>", "")
|
||||
output.append("<ul>")
|
||||
output.append(f"<li>{line.replace('*', '', 1).lstrip()}</li>")
|
||||
else:
|
||||
list_level = end_outstanding_lists(list_level, 0)
|
||||
if len(line) > 0:
|
||||
output.append(line)
|
||||
|
||||
end_outstanding_lists(list_level, 0)
|
||||
output_str = "\n".join(output) + "\n"
|
||||
|
||||
for (fr, to) in HTML_REPLACEMENTS:
|
||||
output_str = output_str.replace(fr, to)
|
||||
|
||||
return output_str
|
||||
@@ -0,0 +1,85 @@
|
||||
#pragma once
|
||||
|
||||
typedef struct vec3 {
|
||||
float v[3];
|
||||
} vec3;
|
||||
|
||||
typedef struct vec4 {
|
||||
float v[4];
|
||||
} vec4;
|
||||
|
||||
typedef struct mat3 {
|
||||
float v[3*3];
|
||||
} mat3;
|
||||
|
||||
typedef struct mat4 {
|
||||
float v[4*4];
|
||||
} mat4;
|
||||
|
||||
static inline mat3 matmul3(const mat3 &a, const mat3 &b) {
|
||||
mat3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<3; k++) {
|
||||
v += a.v[r*3+k] * b.v[k*3+c];
|
||||
}
|
||||
ret.v[r*3+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec3 matvecmul3(const mat3 &a, const vec3 &b) {
|
||||
vec3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
ret.v[r] += a.v[r*3+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline mat4 matmul(const mat4 &a, const mat4 &b) {
|
||||
mat4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<4; k++) {
|
||||
v += a.v[r*4+k] * b.v[k*4+c];
|
||||
}
|
||||
ret.v[r*4+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec4 matvecmul(const mat4 &a, const vec4 &b) {
|
||||
vec4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
ret.v[r] += a.v[r*4+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
// scales the input and output space of a transformation matrix
|
||||
// that assumes pixel-center origin.
|
||||
static inline mat3 transform_scale_buffer(const mat3 &in, float s) {
|
||||
// in_pt = ( transform(out_pt/s + 0.5) - 0.5) * s
|
||||
|
||||
mat3 transform_out = {{
|
||||
1.0f/s, 0.0f, 0.5f,
|
||||
0.0f, 1.0f/s, 0.5f,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
mat3 transform_in = {{
|
||||
s, 0.0f, -0.5f*s,
|
||||
0.0f, s, -0.5f*s,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
return matmul3(transform_in, matmul3(in, transform_out));
|
||||
}
|
||||
@@ -0,0 +1,50 @@
|
||||
"""
|
||||
Utilities for generating mock messages for testing.
|
||||
example in common/tests/test_mock.py
|
||||
"""
|
||||
|
||||
|
||||
import functools
|
||||
import threading
|
||||
from cereal.messaging import PubMaster
|
||||
from cereal.services import SERVICE_LIST
|
||||
from openpilot.common.mock.generators import generate_livePose
|
||||
from openpilot.common.realtime import Ratekeeper
|
||||
|
||||
|
||||
MOCK_GENERATOR = {
|
||||
"livePose": generate_livePose
|
||||
}
|
||||
|
||||
|
||||
def generate_messages_loop(services: list[str], done: threading.Event):
|
||||
pm = PubMaster(services)
|
||||
rk = Ratekeeper(100)
|
||||
i = 0
|
||||
while not done.is_set():
|
||||
for s in services:
|
||||
should_send = i % (100/SERVICE_LIST[s].frequency) == 0
|
||||
if should_send:
|
||||
message = MOCK_GENERATOR[s]()
|
||||
pm.send(s, message)
|
||||
i += 1
|
||||
rk.keep_time()
|
||||
|
||||
|
||||
def mock_messages(services: list[str] | str):
|
||||
if isinstance(services, str):
|
||||
services = [services]
|
||||
|
||||
def decorator(func):
|
||||
@functools.wraps(func)
|
||||
def wrapper(*args, **kwargs):
|
||||
done = threading.Event()
|
||||
t = threading.Thread(target=generate_messages_loop, args=(services, done))
|
||||
t.start()
|
||||
try:
|
||||
return func(*args, **kwargs)
|
||||
finally:
|
||||
done.set()
|
||||
t.join()
|
||||
return wrapper
|
||||
return decorator
|
||||
@@ -0,0 +1,14 @@
|
||||
from cereal import messaging
|
||||
|
||||
|
||||
def generate_livePose():
|
||||
msg = messaging.new_message('livePose')
|
||||
meas = {'x': 0.0, 'y': 0.0, 'z': 0.0, 'xStd': 0.0, 'yStd': 0.0, 'zStd': 0.0, 'valid': True}
|
||||
msg.livePose.orientationNED = meas
|
||||
msg.livePose.velocityDevice = meas
|
||||
msg.livePose.angularVelocityDevice = meas
|
||||
msg.livePose.accelerationDevice = meas
|
||||
msg.livePose.inputsOK = True
|
||||
msg.livePose.posenetOK = True
|
||||
msg.livePose.sensorsOK = True
|
||||
return msg
|
||||
@@ -0,0 +1,90 @@
|
||||
#pragma once
|
||||
|
||||
#include <future>
|
||||
#include <map>
|
||||
#include <optional>
|
||||
#include <string>
|
||||
#include <tuple>
|
||||
#include <utility>
|
||||
#include <vector>
|
||||
|
||||
#include "common/queue.h"
|
||||
|
||||
enum ParamKeyFlag {
|
||||
PERSISTENT = 0x02,
|
||||
CLEAR_ON_MANAGER_START = 0x04,
|
||||
CLEAR_ON_ONROAD_TRANSITION = 0x08,
|
||||
CLEAR_ON_OFFROAD_TRANSITION = 0x10,
|
||||
DONT_LOG = 0x20,
|
||||
DEVELOPMENT_ONLY = 0x40,
|
||||
CLEAR_ON_IGNITION_ON = 0x80,
|
||||
ALL = 0xFFFFFFFF
|
||||
};
|
||||
|
||||
enum ParamKeyType {
|
||||
STRING = 0, // must be utf-8 decodable
|
||||
BOOL = 1,
|
||||
INT = 2,
|
||||
FLOAT = 3,
|
||||
TIME = 4, // ISO 8601
|
||||
JSON = 5,
|
||||
BYTES = 6
|
||||
};
|
||||
|
||||
struct ParamKeyAttributes {
|
||||
uint32_t flags;
|
||||
ParamKeyType type;
|
||||
std::optional<std::string> default_value = std::nullopt;
|
||||
};
|
||||
|
||||
class Params {
|
||||
public:
|
||||
explicit Params(const std::string &path = {});
|
||||
~Params();
|
||||
// Not copyable.
|
||||
Params(const Params&) = delete;
|
||||
Params& operator=(const Params&) = delete;
|
||||
|
||||
std::vector<std::string> allKeys() const;
|
||||
bool checkKey(const std::string &key);
|
||||
ParamKeyFlag getKeyFlag(const std::string &key);
|
||||
ParamKeyType getKeyType(const std::string &key);
|
||||
std::optional<std::string> getKeyDefaultValue(const std::string &key);
|
||||
inline std::string getParamPath(const std::string &key = {}) {
|
||||
return params_path + params_prefix + (key.empty() ? "" : "/" + key);
|
||||
}
|
||||
|
||||
// Delete a value
|
||||
int remove(const std::string &key);
|
||||
void clearAll(ParamKeyFlag flag);
|
||||
|
||||
// helpers for reading values
|
||||
std::string get(const std::string &key, bool block = false);
|
||||
inline bool getBool(const std::string &key, bool block = false) {
|
||||
return get(key, block) == "1";
|
||||
}
|
||||
std::map<std::string, std::string> readAll();
|
||||
|
||||
// helpers for writing values
|
||||
int put(const char *key, const char *val, size_t value_size);
|
||||
inline int put(const std::string &key, const std::string &val) {
|
||||
return put(key.c_str(), val.data(), val.size());
|
||||
}
|
||||
inline int putBool(const std::string &key, bool val) {
|
||||
return put(key.c_str(), val ? "1" : "0", 1);
|
||||
}
|
||||
void putNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putBoolNonBlocking(const std::string &key, bool val) {
|
||||
putNonBlocking(key, val ? "1" : "0");
|
||||
}
|
||||
|
||||
private:
|
||||
void asyncWriteThread();
|
||||
|
||||
std::string params_path;
|
||||
std::string params_prefix;
|
||||
|
||||
// for nonblocking write
|
||||
std::future<void> future;
|
||||
SafeQueue<std::pair<std::string, std::string>> queue;
|
||||
};
|
||||
@@ -0,0 +1,19 @@
|
||||
from openpilot.common.params_pyx import Params, ParamKeyFlag, ParamKeyType, UnknownKeyName
|
||||
assert Params
|
||||
assert ParamKeyFlag
|
||||
assert ParamKeyType
|
||||
assert UnknownKeyName
|
||||
|
||||
if __name__ == "__main__":
|
||||
import sys
|
||||
|
||||
params = Params()
|
||||
key = sys.argv[1]
|
||||
assert params.check_key(key), f"unknown param: {key}"
|
||||
|
||||
if len(sys.argv) == 3:
|
||||
val = sys.argv[2]
|
||||
print(f"SET: {key} = {val}")
|
||||
params.put(key, val)
|
||||
elif len(sys.argv) == 2:
|
||||
print(f"GET: {key} = {params.get(key)}")
|
||||
@@ -0,0 +1,164 @@
|
||||
#pragma once
|
||||
|
||||
#include <string>
|
||||
#include <unordered_map>
|
||||
|
||||
#include "cereal/gen/cpp/log.capnp.h"
|
||||
|
||||
inline static std::unordered_map<std::string, ParamKeyAttributes> keys = {
|
||||
{"AccessToken", {CLEAR_ON_MANAGER_START | DONT_LOG, STRING}},
|
||||
{"AdbEnabled", {PERSISTENT, BOOL}},
|
||||
{"AlwaysOnDM", {PERSISTENT, BOOL}},
|
||||
{"ApiCache_Device", {PERSISTENT, STRING}},
|
||||
{"ApiCache_FirehoseStats", {PERSISTENT, JSON}},
|
||||
{"AssistNowToken", {PERSISTENT, STRING}},
|
||||
{"AthenadPid", {PERSISTENT, INT}},
|
||||
{"AthenadUploadQueue", {PERSISTENT, JSON}},
|
||||
{"AthenadRecentlyViewedRoutes", {PERSISTENT, STRING}},
|
||||
{"BootCount", {PERSISTENT, INT}},
|
||||
{"CalibrationParams", {PERSISTENT, BYTES}},
|
||||
{"CameraDebugExpGain", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"CameraDebugExpTime", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"CarBatteryCapacity", {PERSISTENT, INT}},
|
||||
{"CarParams", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BYTES}},
|
||||
{"CarParamsCache", {CLEAR_ON_MANAGER_START, BYTES}},
|
||||
{"CarParamsPersistent", {PERSISTENT, BYTES}},
|
||||
{"CarParamsPrevRoute", {PERSISTENT, BYTES}},
|
||||
{"CompletedTrainingVersion", {PERSISTENT, STRING, "0"}},
|
||||
{"ControlsReady", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BOOL}},
|
||||
{"CurrentBootlog", {PERSISTENT, STRING}},
|
||||
{"CurrentRoute", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, STRING}},
|
||||
{"DisableLogging", {PERSISTENT, BOOL, "0"}},
|
||||
{"DisablePowerDown", {PERSISTENT, BOOL}},
|
||||
{"DisableUpdates", {PERSISTENT, BOOL}},
|
||||
{"DisengageOnAccelerator", {PERSISTENT, BOOL, "0"}},
|
||||
{"DongleId", {PERSISTENT, STRING}},
|
||||
{"DoReboot", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"DoShutdown", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"DoUninstall", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"DriverTooDistracted", {CLEAR_ON_MANAGER_START | CLEAR_ON_IGNITION_ON, BOOL}},
|
||||
{"AlphaLongitudinalEnabled", {PERSISTENT | DEVELOPMENT_ONLY, BOOL}},
|
||||
{"ExperimentalMode", {PERSISTENT, BOOL}},
|
||||
{"ExperimentalModeConfirmed", {PERSISTENT, BOOL}},
|
||||
{"FirmwareQueryDone", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BOOL}},
|
||||
{"ForcePowerDown", {PERSISTENT, BOOL}},
|
||||
{"GitBranch", {PERSISTENT, STRING}},
|
||||
{"GitCommit", {PERSISTENT, STRING}},
|
||||
{"GitCommitDate", {PERSISTENT, STRING}},
|
||||
{"GitDiff", {PERSISTENT, STRING}},
|
||||
{"GithubSshKeys", {PERSISTENT, STRING}},
|
||||
{"GithubUsername", {PERSISTENT, STRING}},
|
||||
{"GitRemote", {PERSISTENT, STRING}},
|
||||
{"GsmApn", {PERSISTENT, STRING}},
|
||||
{"GsmMetered", {PERSISTENT, BOOL, "1"}},
|
||||
{"GsmRoaming", {PERSISTENT, BOOL}},
|
||||
{"HardwareSerial", {PERSISTENT, STRING}},
|
||||
{"HasAcceptedTerms", {PERSISTENT, STRING, "0"}},
|
||||
{"InstallDate", {PERSISTENT, TIME}},
|
||||
{"IsDriverViewEnabled", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"IsEngaged", {PERSISTENT, BOOL}},
|
||||
{"IsLdwEnabled", {PERSISTENT, BOOL}},
|
||||
{"IsMetric", {PERSISTENT, BOOL}},
|
||||
{"IsOffroad", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"IsOnroad", {PERSISTENT, BOOL}},
|
||||
{"IsRhdDetected", {PERSISTENT, BOOL}},
|
||||
{"IsReleaseBranch", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"IsTakingSnapshot", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"IsTestedBranch", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"JoystickDebugMode", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, BOOL}},
|
||||
{"LanguageSetting", {PERSISTENT, STRING, "en"}},
|
||||
{"LastAthenaPingTime", {CLEAR_ON_MANAGER_START, INT}},
|
||||
{"LastGPSPosition", {PERSISTENT, STRING}},
|
||||
{"LastManagerExitReason", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"LastOffroadStatusPacket", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, JSON}},
|
||||
{"LastPowerDropDetected", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"LastUpdateException", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"LastUpdateRouteCount", {PERSISTENT, INT, "0"}},
|
||||
{"LastUpdateTime", {PERSISTENT, TIME}},
|
||||
{"LastUpdateUptimeOnroad", {PERSISTENT, FLOAT, "0.0"}},
|
||||
{"LiveDelay", {PERSISTENT, BYTES}},
|
||||
{"LiveParameters", {PERSISTENT, JSON}},
|
||||
{"LiveParametersV2", {PERSISTENT, BYTES}},
|
||||
{"LiveTorqueParameters", {PERSISTENT | DONT_LOG, BYTES}},
|
||||
{"LocationFilterInitialState", {PERSISTENT, BYTES}},
|
||||
{"LongitudinalManeuverMode", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, BOOL}},
|
||||
{"LongitudinalPersonality", {PERSISTENT, INT, std::to_string(static_cast<int>(cereal::LongitudinalPersonality::STANDARD))}},
|
||||
{"NetworkMetered", {PERSISTENT, BOOL}},
|
||||
{"ObdMultiplexingChanged", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BOOL}},
|
||||
{"ObdMultiplexingEnabled", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BOOL}},
|
||||
{"Offroad_CarUnrecognized", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, JSON}},
|
||||
{"Offroad_ConnectivityNeeded", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_ConnectivityNeededPrompt", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_ExcessiveActuation", {PERSISTENT, JSON}},
|
||||
{"Offroad_IsTakingSnapshot", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_NeosUpdate", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_NoFirmware", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, JSON}},
|
||||
{"Offroad_Recalibration", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, JSON}},
|
||||
{"Offroad_TemperatureTooHigh", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_UnregisteredHardware", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_UpdateFailed", {CLEAR_ON_MANAGER_START, JSON}},
|
||||
{"Offroad_DriverMonitoringUncertain", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, JSON}},
|
||||
{"OnroadCycleRequested", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"OpenpilotEnabledToggle", {PERSISTENT, BOOL, "1"}},
|
||||
{"PandaHeartbeatLost", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, BOOL}},
|
||||
{"PandaSomResetTriggered", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, BOOL}},
|
||||
{"PandaSignatures", {CLEAR_ON_MANAGER_START, BYTES}},
|
||||
{"PrimeType", {PERSISTENT, INT}},
|
||||
{"RecordAudio", {PERSISTENT, BOOL}},
|
||||
{"RecordAudioFeedback", {PERSISTENT, BOOL, "0"}},
|
||||
{"RecordFront", {PERSISTENT, BOOL}},
|
||||
{"RecordFrontLock", {PERSISTENT, BOOL}}, // for the internal fleet
|
||||
{"SecOCKey", {PERSISTENT | DONT_LOG, STRING}},
|
||||
{"ShowDebugInfo", {PERSISTENT, BOOL}},
|
||||
{"RouteCount", {PERSISTENT, INT, "0"}},
|
||||
{"SnoozeUpdate", {CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION, BOOL}},
|
||||
{"SshEnabled", {PERSISTENT, BOOL}},
|
||||
{"UbloxAvailable", {PERSISTENT, BOOL}},
|
||||
{"UpdateAvailable", {CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION, BOOL}},
|
||||
{"UpdateFailedCount", {CLEAR_ON_MANAGER_START, INT}},
|
||||
{"UpdaterAvailableBranches", {PERSISTENT, STRING}},
|
||||
{"UpdaterCurrentDescription", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"UpdaterCurrentReleaseNotes", {CLEAR_ON_MANAGER_START, BYTES}},
|
||||
{"UpdaterFetchAvailable", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"UpdaterNewDescription", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"UpdaterNewReleaseNotes", {CLEAR_ON_MANAGER_START, BYTES}},
|
||||
{"UpdaterState", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"UpdaterTargetBranch", {CLEAR_ON_MANAGER_START, STRING}},
|
||||
{"UpdaterLastFetchTime", {PERSISTENT, TIME}},
|
||||
{"UptimeOffroad", {PERSISTENT, FLOAT, "0.0"}},
|
||||
{"UptimeOnroad", {PERSISTENT, FLOAT, "0.0"}},
|
||||
{"Version", {PERSISTENT, STRING}},
|
||||
{"dp_dev_last_log", {CLEAR_ON_ONROAD_TRANSITION, STRING}},
|
||||
{"dp_dev_reset_conf", {CLEAR_ON_MANAGER_START, BOOL, "0"}},
|
||||
{"dp_dev_is_rhd", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_dev_monitoring_disabled", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_dev_beep", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_lat_alka", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_ui_display_mode", {PERSISTENT, INT, "0"}},
|
||||
{"dp_dev_model_selected", {PERSISTENT, STRING}},
|
||||
{"dp_dev_model_list", {PERSISTENT, STRING}},
|
||||
{"dp_lat_lca_speed", {PERSISTENT, INT, "20"}},
|
||||
{"dp_lat_lca_auto_sec", {PERSISTENT, FLOAT, "0.0"}},
|
||||
{"dp_dev_go_off_road", {CLEAR_ON_MANAGER_START, BOOL}},
|
||||
{"dp_ui_hide_hud_speed_kph", {PERSISTENT, INT, "0"}},
|
||||
{"dp_lon_ext_radar", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_lat_road_edge_detection", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_ui_rainbow", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_lon_acm", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_lon_aem", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_lon_dtsc", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_dev_audible_alert_mode", {PERSISTENT, INT, "0"}},
|
||||
{"dp_dev_auto_shutdown_in", {PERSISTENT, INT, "-5"}},
|
||||
{"dp_ui_lead", {PERSISTENT, INT, "0"}},
|
||||
{"dp_dev_dashy", {PERSISTENT, INT, "0"}},
|
||||
{"dp_dev_delay_loggerd", {PERSISTENT, INT, "0"}},
|
||||
{"dp_dev_disable_connect", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_dev_tethering", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_toyota_door_auto_lock_unlock", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_toyota_tss1_sng", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_toyota_stock_lon", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_vag_a0_sng", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_vag_pq_steering_patch", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_vag_avoid_eps_lockout", {PERSISTENT, BOOL, "0"}},
|
||||
{"dp_ui_four", {PERSISTENT, BOOL, "0"}},
|
||||
};
|
||||
+17739
File diff suppressed because it is too large
Load Diff
@@ -0,0 +1,196 @@
|
||||
# distutils: language = c++
|
||||
# cython: language_level = 3
|
||||
import builtins
|
||||
import datetime
|
||||
import json
|
||||
from libcpp cimport bool
|
||||
from libcpp.string cimport string
|
||||
from libcpp.vector cimport vector
|
||||
from libcpp.optional cimport optional
|
||||
|
||||
from openpilot.common.swaglog import cloudlog
|
||||
|
||||
cdef extern from "common/params.h":
|
||||
cpdef enum ParamKeyFlag:
|
||||
PERSISTENT
|
||||
CLEAR_ON_MANAGER_START
|
||||
CLEAR_ON_ONROAD_TRANSITION
|
||||
CLEAR_ON_OFFROAD_TRANSITION
|
||||
DEVELOPMENT_ONLY
|
||||
CLEAR_ON_IGNITION_ON
|
||||
ALL
|
||||
|
||||
cpdef enum ParamKeyType:
|
||||
STRING
|
||||
BOOL
|
||||
INT
|
||||
FLOAT
|
||||
TIME
|
||||
JSON
|
||||
BYTES
|
||||
|
||||
cdef cppclass c_Params "Params":
|
||||
c_Params(string) except + nogil
|
||||
string get(string, bool) nogil
|
||||
bool getBool(string, bool) nogil
|
||||
int remove(string) nogil
|
||||
int put(string, string) nogil
|
||||
void putNonBlocking(string, string) nogil
|
||||
void putBoolNonBlocking(string, bool) nogil
|
||||
int putBool(string, bool) nogil
|
||||
bool checkKey(string) nogil
|
||||
ParamKeyType getKeyType(string) nogil
|
||||
optional[string] getKeyDefaultValue(string) nogil
|
||||
string getParamPath(string) nogil
|
||||
void clearAll(ParamKeyFlag)
|
||||
vector[string] allKeys()
|
||||
|
||||
PYTHON_2_CPP = {
|
||||
(str, STRING): lambda v: v,
|
||||
(builtins.bool, BOOL): lambda v: "1" if v else "0",
|
||||
(int, INT): str,
|
||||
(float, FLOAT): str,
|
||||
(datetime.datetime, TIME): lambda v: v.isoformat(),
|
||||
(dict, JSON): json.dumps,
|
||||
(list, JSON): json.dumps,
|
||||
(bytes, BYTES): lambda v: v,
|
||||
}
|
||||
CPP_2_PYTHON = {
|
||||
STRING: lambda v: v.decode("utf-8"),
|
||||
BOOL: lambda v: v == b"1",
|
||||
INT: int,
|
||||
FLOAT: float,
|
||||
TIME: lambda v: datetime.datetime.fromisoformat(v.decode("utf-8")),
|
||||
JSON: json.loads,
|
||||
BYTES: lambda v: v,
|
||||
}
|
||||
|
||||
def ensure_bytes(v):
|
||||
return v.encode() if isinstance(v, str) else v
|
||||
|
||||
class UnknownKeyName(Exception):
|
||||
pass
|
||||
|
||||
cdef class Params:
|
||||
cdef c_Params* p
|
||||
cdef str d
|
||||
|
||||
def __cinit__(self, d=""):
|
||||
cdef string path = <string>d.encode()
|
||||
with nogil:
|
||||
self.p = new c_Params(path)
|
||||
self.d = d
|
||||
|
||||
def __reduce__(self):
|
||||
return (type(self), (self.d,))
|
||||
|
||||
def __dealloc__(self):
|
||||
del self.p
|
||||
|
||||
def clear_all(self, tx_flag=ParamKeyFlag.ALL):
|
||||
self.p.clearAll(tx_flag)
|
||||
|
||||
def check_key(self, key):
|
||||
key = ensure_bytes(key)
|
||||
if not self.p.checkKey(key):
|
||||
raise UnknownKeyName(key)
|
||||
return key
|
||||
|
||||
def python2cpp(self, proposed_type, expected_type, value, key):
|
||||
cast = PYTHON_2_CPP.get((proposed_type, expected_type))
|
||||
if cast:
|
||||
return cast(value)
|
||||
raise TypeError(f"Type mismatch while writing param {key}: {proposed_type=} {expected_type=} {value=}")
|
||||
|
||||
def _cpp2python(self, t, value, default, key):
|
||||
if value is None:
|
||||
return None
|
||||
try:
|
||||
return CPP_2_PYTHON[t](value)
|
||||
except (KeyError, TypeError, ValueError):
|
||||
cloudlog.warning(f"Failed to cast param {key} with {value=} from type {t=}")
|
||||
return self._cpp2python(t, default, None, key)
|
||||
|
||||
def get(self, key, bool block=False, bool return_default=False):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef ParamKeyType t = self.p.getKeyType(k)
|
||||
cdef optional[string] default = self.p.getKeyDefaultValue(k)
|
||||
cdef string val
|
||||
with nogil:
|
||||
val = self.p.get(k, block)
|
||||
|
||||
default_val = (default.value() if default.has_value() else None) if return_default else None
|
||||
if val == b"":
|
||||
if block:
|
||||
# If we got no value while running in blocked mode
|
||||
# it means we got an interrupt while waiting
|
||||
raise KeyboardInterrupt
|
||||
else:
|
||||
return self._cpp2python(t, default_val, None, key)
|
||||
return self._cpp2python(t, val, default_val, key)
|
||||
|
||||
def get_bool(self, key, bool block=False):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef bool r
|
||||
with nogil:
|
||||
r = self.p.getBool(k, block)
|
||||
return r
|
||||
|
||||
def _put_cast(self, key, dat):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef ParamKeyType t = self.p.getKeyType(k)
|
||||
return ensure_bytes(self.python2cpp(type(dat), t, dat, key))
|
||||
|
||||
def put(self, key, dat):
|
||||
"""
|
||||
Warning: This function blocks until the param is written to disk!
|
||||
In very rare cases this can take over a second, and your code will hang.
|
||||
Use the put_nonblocking, put_bool_nonblocking in time sensitive code, but
|
||||
in general try to avoid writing params as much as possible.
|
||||
"""
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = self._put_cast(key, dat)
|
||||
with nogil:
|
||||
self.p.put(k, dat_bytes)
|
||||
|
||||
def put_bool(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBool(k, val)
|
||||
|
||||
def put_nonblocking(self, key, dat):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = self._put_cast(key, dat)
|
||||
with nogil:
|
||||
self.p.putNonBlocking(k, dat_bytes)
|
||||
|
||||
def put_bool_nonblocking(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBoolNonBlocking(k, val)
|
||||
|
||||
def remove(self, key):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.remove(k)
|
||||
|
||||
def get_param_path(self, key=""):
|
||||
cdef string key_bytes = ensure_bytes(key)
|
||||
return self.p.getParamPath(key_bytes).decode("utf-8")
|
||||
|
||||
def get_type(self, key):
|
||||
return self.p.getKeyType(self.check_key(key))
|
||||
|
||||
def all_keys(self):
|
||||
return self.p.allKeys()
|
||||
|
||||
def get_default_value(self, key):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef ParamKeyType t = self.p.getKeyType(k)
|
||||
cdef optional[string] default = self.p.getKeyDefaultValue(k)
|
||||
return self._cpp2python(t, default.value(), None, key) if default.has_value() else None
|
||||
|
||||
def cpp2python(self, key, value):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef ParamKeyType t = self.p.getKeyType(k)
|
||||
return self._cpp2python(t, value, None, key)
|
||||
Executable
BIN
Binary file not shown.
@@ -0,0 +1,63 @@
|
||||
import numpy as np
|
||||
from numbers import Number
|
||||
|
||||
class PIDController:
|
||||
def __init__(self, k_p, k_i, k_d=0., pos_limit=1e308, neg_limit=-1e308, rate=100):
|
||||
self._k_p = k_p
|
||||
self._k_i = k_i
|
||||
self._k_d = k_d
|
||||
if isinstance(self._k_p, Number):
|
||||
self._k_p = [[0], [self._k_p]]
|
||||
if isinstance(self._k_i, Number):
|
||||
self._k_i = [[0], [self._k_i]]
|
||||
if isinstance(self._k_d, Number):
|
||||
self._k_d = [[0], [self._k_d]]
|
||||
|
||||
self.set_limits(pos_limit, neg_limit)
|
||||
|
||||
self.i_dt = 1.0 / rate
|
||||
self.speed = 0.0
|
||||
|
||||
self.reset()
|
||||
|
||||
@property
|
||||
def k_p(self):
|
||||
return np.interp(self.speed, self._k_p[0], self._k_p[1])
|
||||
|
||||
@property
|
||||
def k_i(self):
|
||||
return np.interp(self.speed, self._k_i[0], self._k_i[1])
|
||||
|
||||
@property
|
||||
def k_d(self):
|
||||
return np.interp(self.speed, self._k_d[0], self._k_d[1])
|
||||
|
||||
def reset(self):
|
||||
self.p = 0.0
|
||||
self.i = 0.0
|
||||
self.d = 0.0
|
||||
self.f = 0.0
|
||||
self.control = 0
|
||||
|
||||
def set_limits(self, pos_limit, neg_limit):
|
||||
self.pos_limit = pos_limit
|
||||
self.neg_limit = neg_limit
|
||||
|
||||
def update(self, error, error_rate=0.0, speed=0.0, feedforward=0., freeze_integrator=False):
|
||||
self.speed = speed
|
||||
self.p = self.k_p * float(error)
|
||||
self.d = self.k_d * error_rate
|
||||
self.f = feedforward
|
||||
|
||||
if not freeze_integrator:
|
||||
i = self.i + self.k_i * self.i_dt * error
|
||||
|
||||
# Don't allow windup if already clipping
|
||||
test_control = self.p + i + self.d + self.f
|
||||
i_upperbound = self.i if test_control > self.pos_limit else self.pos_limit
|
||||
i_lowerbound = self.i if test_control < self.neg_limit else self.neg_limit
|
||||
self.i = np.clip(i, i_lowerbound, i_upperbound)
|
||||
|
||||
control = self.p + self.i + self.d + self.f
|
||||
self.control = np.clip(control, self.neg_limit, self.pos_limit)
|
||||
return self.control
|
||||
@@ -0,0 +1,39 @@
|
||||
#pragma once
|
||||
|
||||
#include <cassert>
|
||||
#include <string>
|
||||
|
||||
#include "common/params.h"
|
||||
#include "common/util.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
class OpenpilotPrefix {
|
||||
public:
|
||||
OpenpilotPrefix(std::string prefix = {}) {
|
||||
if (prefix.empty()) {
|
||||
prefix = util::random_string(15);
|
||||
}
|
||||
msgq_path = Path::shm_path() + "/" + prefix;
|
||||
bool ret = util::create_directories(msgq_path, 0777);
|
||||
assert(ret);
|
||||
setenv("OPENPILOT_PREFIX", prefix.c_str(), 1);
|
||||
}
|
||||
|
||||
~OpenpilotPrefix() {
|
||||
auto param_path = Params().getParamPath();
|
||||
if (util::file_exists(param_path)) {
|
||||
std::string real_path = util::readlink(param_path);
|
||||
system(util::string_format("rm %s -rf", real_path.c_str()).c_str());
|
||||
unlink(param_path.c_str());
|
||||
}
|
||||
if (getenv("COMMA_CACHE") == nullptr) {
|
||||
system(util::string_format("rm %s -rf", Path::download_cache_root().c_str()).c_str());
|
||||
}
|
||||
system(util::string_format("rm %s -rf", Path::comma_home().c_str()).c_str());
|
||||
system(util::string_format("rm %s -rf", msgq_path.c_str()).c_str());
|
||||
unsetenv("OPENPILOT_PREFIX");
|
||||
}
|
||||
|
||||
private:
|
||||
std::string msgq_path;
|
||||
};
|
||||
@@ -0,0 +1,59 @@
|
||||
import os
|
||||
import shutil
|
||||
import uuid
|
||||
|
||||
|
||||
from openpilot.common.params import Params
|
||||
from openpilot.system.hardware import PC
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
from openpilot.system.hardware.hw import DEFAULT_DOWNLOAD_CACHE_ROOT
|
||||
|
||||
class OpenpilotPrefix:
|
||||
def __init__(self, prefix: str = None, create_dirs_on_enter: bool = True, clean_dirs_on_exit: bool = True, shared_download_cache: bool = False):
|
||||
self.prefix = prefix if prefix else str(uuid.uuid4().hex[0:15])
|
||||
self.msgq_path = os.path.join(Paths.shm_path(), self.prefix)
|
||||
self.create_dirs_on_enter = create_dirs_on_enter
|
||||
self.clean_dirs_on_exit = clean_dirs_on_exit
|
||||
self.shared_download_cache = shared_download_cache
|
||||
|
||||
def __enter__(self):
|
||||
self.original_prefix = os.environ.get('OPENPILOT_PREFIX', None)
|
||||
os.environ['OPENPILOT_PREFIX'] = self.prefix
|
||||
|
||||
if self.create_dirs_on_enter:
|
||||
self.create_dirs()
|
||||
|
||||
if self.shared_download_cache:
|
||||
os.environ["COMMA_CACHE"] = DEFAULT_DOWNLOAD_CACHE_ROOT
|
||||
|
||||
return self
|
||||
|
||||
def __exit__(self, exc_type, exc_obj, exc_tb):
|
||||
if self.clean_dirs_on_exit:
|
||||
self.clean_dirs()
|
||||
try:
|
||||
del os.environ['OPENPILOT_PREFIX']
|
||||
if self.original_prefix is not None:
|
||||
os.environ['OPENPILOT_PREFIX'] = self.original_prefix
|
||||
except KeyError:
|
||||
pass
|
||||
return False
|
||||
|
||||
def create_dirs(self):
|
||||
try:
|
||||
os.mkdir(self.msgq_path)
|
||||
except FileExistsError:
|
||||
pass
|
||||
os.makedirs(Paths.log_root(), exist_ok=True)
|
||||
|
||||
def clean_dirs(self):
|
||||
symlink_path = Params().get_param_path()
|
||||
if os.path.exists(symlink_path):
|
||||
shutil.rmtree(os.path.realpath(symlink_path), ignore_errors=True)
|
||||
os.remove(symlink_path)
|
||||
shutil.rmtree(self.msgq_path, ignore_errors=True)
|
||||
if PC:
|
||||
shutil.rmtree(Paths.log_root(), ignore_errors=True)
|
||||
if not os.environ.get("COMMA_CACHE", False):
|
||||
shutil.rmtree(Paths.download_cache_root(), ignore_errors=True)
|
||||
shutil.rmtree(Paths.comma_home(), ignore_errors=True)
|
||||
@@ -0,0 +1,52 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <mutex>
|
||||
#include <queue>
|
||||
|
||||
template <class T>
|
||||
class SafeQueue {
|
||||
public:
|
||||
SafeQueue() = default;
|
||||
|
||||
void push(const T& v) {
|
||||
{
|
||||
std::unique_lock lk(m);
|
||||
q.push(v);
|
||||
}
|
||||
cv.notify_one();
|
||||
}
|
||||
|
||||
T pop() {
|
||||
std::unique_lock lk(m);
|
||||
cv.wait(lk, [this] { return !q.empty(); });
|
||||
T v = q.front();
|
||||
q.pop();
|
||||
return v;
|
||||
}
|
||||
|
||||
bool try_pop(T& v, int timeout_ms = 0) {
|
||||
std::unique_lock lk(m);
|
||||
if (!cv.wait_for(lk, std::chrono::milliseconds(timeout_ms), [this] { return !q.empty(); })) {
|
||||
return false;
|
||||
}
|
||||
v = q.front();
|
||||
q.pop();
|
||||
return true;
|
||||
}
|
||||
|
||||
bool empty() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.empty();
|
||||
}
|
||||
|
||||
size_t size() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.size();
|
||||
}
|
||||
|
||||
private:
|
||||
mutable std::mutex m;
|
||||
std::condition_variable cv;
|
||||
std::queue<T> q;
|
||||
};
|
||||
@@ -0,0 +1,23 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <string>
|
||||
|
||||
class RateKeeper {
|
||||
public:
|
||||
RateKeeper(const std::string &name, float rate, float print_delay_threshold = 0);
|
||||
~RateKeeper() {}
|
||||
bool keepTime();
|
||||
bool monitorTime();
|
||||
inline uint64_t frame() const { return frame_; }
|
||||
inline double remaining() const { return remaining_; }
|
||||
|
||||
private:
|
||||
double interval;
|
||||
double next_frame_time;
|
||||
double last_monitor_time;
|
||||
double remaining_ = 0;
|
||||
float print_delay_threshold = 0;
|
||||
uint64_t frame_ = 0;
|
||||
std::string name;
|
||||
};
|
||||
@@ -0,0 +1,96 @@
|
||||
"""Utilities for reading real time clocks and keeping soft real time constraints."""
|
||||
import gc
|
||||
import os
|
||||
import sys
|
||||
import time
|
||||
|
||||
from setproctitle import getproctitle
|
||||
|
||||
from openpilot.common.util import MovingAverage
|
||||
from openpilot.system.hardware import PC
|
||||
|
||||
|
||||
# time step for each process
|
||||
DT_CTRL = 0.01 # controlsd
|
||||
DT_MDL = 0.05 # model
|
||||
DT_HW = 0.5 # hardwared and manager
|
||||
DT_DMON = 0.05 # driver monitoring
|
||||
|
||||
|
||||
class Priority:
|
||||
# CORE 2
|
||||
# - modeld = 55
|
||||
# - camerad = 54
|
||||
CTRL_LOW = 51 # plannerd & radard
|
||||
|
||||
# CORE 3
|
||||
# - pandad = 55
|
||||
CTRL_HIGH = 53
|
||||
|
||||
|
||||
def set_core_affinity(cores: list[int]) -> None:
|
||||
if sys.platform == 'linux' and not PC:
|
||||
os.sched_setaffinity(0, cores)
|
||||
|
||||
|
||||
def config_realtime_process(cores: int | list[int], priority: int) -> None:
|
||||
gc.disable()
|
||||
if sys.platform == 'linux' and not PC:
|
||||
os.sched_setscheduler(0, os.SCHED_FIFO, os.sched_param(priority))
|
||||
c = cores if isinstance(cores, list) else [cores, ]
|
||||
set_core_affinity(c)
|
||||
|
||||
|
||||
class Ratekeeper:
|
||||
def __init__(self, rate: float, print_delay_threshold: float | None = 0.0) -> None:
|
||||
"""Rate in Hz for ratekeeping. print_delay_threshold must be nonnegative."""
|
||||
self._interval = 1. / rate
|
||||
self._print_delay_threshold = print_delay_threshold
|
||||
self._frame = 0
|
||||
self._remaining = 0.0
|
||||
self._process_name = getproctitle()
|
||||
self._last_monitor_time = -1.
|
||||
self._next_frame_time = -1.
|
||||
|
||||
self.avg_dt = MovingAverage(100)
|
||||
self.avg_dt.add_value(self._interval)
|
||||
|
||||
@property
|
||||
def frame(self) -> int:
|
||||
return self._frame
|
||||
|
||||
@property
|
||||
def remaining(self) -> float:
|
||||
return self._remaining
|
||||
|
||||
@property
|
||||
def lagging(self) -> bool:
|
||||
expected_dt = self._interval * (1 / 0.9)
|
||||
return self.avg_dt.get_average() > expected_dt
|
||||
|
||||
# Maintain loop rate by calling this at the end of each loop
|
||||
def keep_time(self) -> bool:
|
||||
lagged = self.monitor_time()
|
||||
if self._remaining > 0:
|
||||
time.sleep(self._remaining)
|
||||
return lagged
|
||||
|
||||
# Monitors the cumulative lag, but does not enforce a rate
|
||||
def monitor_time(self) -> bool:
|
||||
if self._last_monitor_time < 0:
|
||||
self._next_frame_time = time.monotonic() + self._interval
|
||||
self._last_monitor_time = time.monotonic()
|
||||
|
||||
prev = self._last_monitor_time
|
||||
self._last_monitor_time = time.monotonic()
|
||||
self.avg_dt.add_value(self._last_monitor_time - prev)
|
||||
|
||||
lagged = False
|
||||
remaining = self._next_frame_time - time.monotonic()
|
||||
self._next_frame_time += self._interval
|
||||
if self._print_delay_threshold is not None and remaining < -self._print_delay_threshold:
|
||||
print(f"{self._process_name} lagging by {-remaining * 1000:.2f} ms")
|
||||
lagged = True
|
||||
self._frame += 1
|
||||
self._remaining = remaining
|
||||
return lagged
|
||||
@@ -0,0 +1,54 @@
|
||||
import numpy as np
|
||||
|
||||
|
||||
def get_kalman_gain(dt, A, C, Q, R, iterations=100):
|
||||
P = np.zeros_like(Q)
|
||||
for _ in range(iterations):
|
||||
P = A.dot(P).dot(A.T) + dt * Q
|
||||
S = C.dot(P).dot(C.T) + R
|
||||
K = P.dot(C.T).dot(np.linalg.inv(S))
|
||||
P = (np.eye(len(P)) - K.dot(C)).dot(P)
|
||||
return K
|
||||
|
||||
|
||||
class KF1D:
|
||||
# this EKF assumes constant covariance matrix, so calculations are much simpler
|
||||
# the Kalman gain also needs to be precomputed using the control module
|
||||
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x0_0 = x0[0][0]
|
||||
self.x1_0 = x0[1][0]
|
||||
self.A0_0 = A[0][0]
|
||||
self.A0_1 = A[0][1]
|
||||
self.A1_0 = A[1][0]
|
||||
self.A1_1 = A[1][1]
|
||||
self.C0_0 = C[0]
|
||||
self.C0_1 = C[1]
|
||||
self.K0_0 = K[0][0]
|
||||
self.K1_0 = K[1][0]
|
||||
|
||||
self.A_K_0 = self.A0_0 - self.K0_0 * self.C0_0
|
||||
self.A_K_1 = self.A0_1 - self.K0_0 * self.C0_1
|
||||
self.A_K_2 = self.A1_0 - self.K1_0 * self.C0_0
|
||||
self.A_K_3 = self.A1_1 - self.K1_0 * self.C0_1
|
||||
|
||||
# K matrix needs to be pre-computed as follow:
|
||||
# import control
|
||||
# (x, l, K) = control.dare(np.transpose(self.A), np.transpose(self.C), Q, R)
|
||||
# self.K = np.transpose(K)
|
||||
|
||||
def update(self, meas):
|
||||
#self.x = np.dot(self.A_K, self.x) + np.dot(self.K, meas)
|
||||
x0_0 = self.A_K_0 * self.x0_0 + self.A_K_1 * self.x1_0 + self.K0_0 * meas
|
||||
x1_0 = self.A_K_2 * self.x0_0 + self.A_K_3 * self.x1_0 + self.K1_0 * meas
|
||||
self.x0_0 = x0_0
|
||||
self.x1_0 = x1_0
|
||||
return [self.x0_0, self.x1_0]
|
||||
|
||||
@property
|
||||
def x(self):
|
||||
return [[self.x0_0], [self.x1_0]]
|
||||
|
||||
def set_x(self, x):
|
||||
self.x0_0 = x[0][0]
|
||||
self.x1_0 = x[1][0]
|
||||
Executable
+52
@@ -0,0 +1,52 @@
|
||||
import os
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class Spinner:
|
||||
def __init__(self):
|
||||
try:
|
||||
self.spinner_proc = subprocess.Popen(["./spinner.py"],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "system", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.spinner_proc = None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def update(self, spinner_text: str):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.stdin.write(spinner_text.encode('utf8') + b"\n")
|
||||
try:
|
||||
self.spinner_proc.stdin.flush()
|
||||
except BrokenPipeError:
|
||||
pass
|
||||
|
||||
def update_progress(self, cur: float, total: float):
|
||||
self.update(str(round(100 * cur / total)))
|
||||
|
||||
def close(self):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.kill()
|
||||
try:
|
||||
self.spinner_proc.communicate(timeout=2.)
|
||||
except subprocess.TimeoutExpired:
|
||||
print("WARNING: failed to kill spinner")
|
||||
self.spinner_proc = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
import time
|
||||
with Spinner() as s:
|
||||
s.update("Spinner text")
|
||||
time.sleep(5.0)
|
||||
print("gone")
|
||||
time.sleep(5.0)
|
||||
@@ -0,0 +1,73 @@
|
||||
import numpy as np
|
||||
|
||||
class RunningStat:
|
||||
# tracks realtime mean and standard deviation without storing any data
|
||||
def __init__(self, priors=None, max_trackable=-1):
|
||||
self.max_trackable = max_trackable
|
||||
if priors is not None:
|
||||
# initialize from history
|
||||
self.M = priors[0]
|
||||
self.S = priors[1]
|
||||
self.n = priors[2]
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
else:
|
||||
self.reset()
|
||||
|
||||
def reset(self):
|
||||
self.M = 0.
|
||||
self.S = 0.
|
||||
self.M_last = 0.
|
||||
self.S_last = 0.
|
||||
self.n = 0
|
||||
|
||||
def push_data(self, new_data):
|
||||
# short term memory hack
|
||||
if self.max_trackable < 0 or self.n < self.max_trackable:
|
||||
self.n += 1
|
||||
if self.n == 0:
|
||||
self.M_last = new_data
|
||||
self.M = self.M_last
|
||||
self.S_last = 0.
|
||||
else:
|
||||
self.M = self.M_last + (new_data - self.M_last) / self.n
|
||||
self.S = self.S_last + (new_data - self.M_last) * (new_data - self.M)
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
def mean(self):
|
||||
return self.M
|
||||
|
||||
def variance(self):
|
||||
if self.n >= 2:
|
||||
return self.S / (self.n - 1.)
|
||||
else:
|
||||
return 0
|
||||
|
||||
def std(self):
|
||||
return np.sqrt(self.variance())
|
||||
|
||||
def params_to_save(self):
|
||||
return [self.M, self.S, self.n]
|
||||
|
||||
class RunningStatFilter:
|
||||
def __init__(self, raw_priors=None, filtered_priors=None, max_trackable=-1):
|
||||
self.raw_stat = RunningStat(raw_priors, -1)
|
||||
self.filtered_stat = RunningStat(filtered_priors, max_trackable)
|
||||
|
||||
def reset(self):
|
||||
self.raw_stat.reset()
|
||||
self.filtered_stat.reset()
|
||||
|
||||
def push_and_update(self, new_data):
|
||||
_std_last = self.raw_stat.std()
|
||||
self.raw_stat.push_data(new_data)
|
||||
_delta_std = self.raw_stat.std() - _std_last
|
||||
if _delta_std <= 0:
|
||||
self.filtered_stat.push_data(new_data)
|
||||
else:
|
||||
pass
|
||||
# self.filtered_stat.push_data(self.filtered_stat.mean())
|
||||
|
||||
# class SequentialBayesian():
|
||||
@@ -0,0 +1,76 @@
|
||||
#pragma once
|
||||
|
||||
#include "common/timing.h"
|
||||
|
||||
#define CLOUDLOG_DEBUG 10
|
||||
#define CLOUDLOG_INFO 20
|
||||
#define CLOUDLOG_WARNING 30
|
||||
#define CLOUDLOG_ERROR 40
|
||||
#define CLOUDLOG_CRITICAL 50
|
||||
|
||||
|
||||
#ifdef __GNUC__
|
||||
#define SWAG_LOG_CHECK_FMT(a, b) __attribute__ ((format (printf, a, b)))
|
||||
#else
|
||||
#define SWAG_LOG_CHECK_FMT(a, b)
|
||||
#endif
|
||||
|
||||
void cloudlog_e(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, ...) SWAG_LOG_CHECK_FMT(6, 7);
|
||||
|
||||
|
||||
#define cloudlog(lvl, fmt, ...) cloudlog_e(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
fmt, ## __VA_ARGS__)
|
||||
|
||||
#define cloudlog_t(lvl, ...) cloudlog_te(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
__VA_ARGS__)
|
||||
|
||||
|
||||
#define cloudlog_rl(burst, millis, lvl, fmt, ...) \
|
||||
{ \
|
||||
static uint64_t __begin = 0; \
|
||||
static int __printed = 0; \
|
||||
static int __missed = 0; \
|
||||
\
|
||||
int __burst = (burst); \
|
||||
int __millis = (millis); \
|
||||
uint64_t __ts = nanos_since_boot(); \
|
||||
\
|
||||
if (!__begin) { __begin = __ts; } \
|
||||
\
|
||||
if (__begin + __millis*1000000ULL < __ts) { \
|
||||
if (__missed) { \
|
||||
cloudlog(CLOUDLOG_WARNING, "cloudlog: %d messages suppressed", __missed); \
|
||||
} \
|
||||
__begin = 0; \
|
||||
__printed = 0; \
|
||||
__missed = 0; \
|
||||
} \
|
||||
\
|
||||
if (__printed < __burst) { \
|
||||
cloudlog(lvl, fmt, ## __VA_ARGS__); \
|
||||
__printed++; \
|
||||
} else { \
|
||||
__missed++; \
|
||||
} \
|
||||
}
|
||||
|
||||
|
||||
#define LOGT(...) cloudlog_t(CLOUDLOG_DEBUG, __VA_ARGS__)
|
||||
#define LOGD(fmt, ...) cloudlog(CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG(fmt, ...) cloudlog(CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW(fmt, ...) cloudlog(CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE(fmt, ...) cloudlog(CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
|
||||
#define LOGD_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
@@ -0,0 +1,144 @@
|
||||
import logging
|
||||
import os
|
||||
import time
|
||||
import warnings
|
||||
from pathlib import Path
|
||||
from logging.handlers import BaseRotatingHandler
|
||||
|
||||
import zmq
|
||||
|
||||
from openpilot.common.logging_extra import SwagLogger, SwagFormatter, SwagLogFileFormatter
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
|
||||
|
||||
def get_file_handler():
|
||||
Path(Paths.swaglog_root()).mkdir(parents=True, exist_ok=True)
|
||||
base_filename = os.path.join(Paths.swaglog_root(), "swaglog")
|
||||
handler = SwaglogRotatingFileHandler(base_filename)
|
||||
return handler
|
||||
|
||||
class SwaglogRotatingFileHandler(BaseRotatingHandler):
|
||||
def __init__(self, base_filename, interval=60, max_bytes=1024*256, backup_count=2500, encoding=None):
|
||||
super().__init__(base_filename, mode="a", encoding=encoding, delay=True)
|
||||
self.base_filename = base_filename
|
||||
self.interval = interval # seconds
|
||||
self.max_bytes = max_bytes
|
||||
self.backup_count = backup_count
|
||||
self.log_files = self.get_existing_logfiles()
|
||||
log_indexes = [f.split(".")[-1] for f in self.log_files]
|
||||
self.last_file_idx = max([int(i) for i in log_indexes if i.isdigit()] or [-1])
|
||||
self.last_rollover = None
|
||||
self.doRollover()
|
||||
|
||||
def _open(self):
|
||||
self.last_rollover = time.monotonic()
|
||||
self.last_file_idx += 1
|
||||
next_filename = f"{self.base_filename}.{self.last_file_idx:010}"
|
||||
stream = open(next_filename, self.mode, encoding=self.encoding)
|
||||
self.log_files.insert(0, next_filename)
|
||||
return stream
|
||||
|
||||
def get_existing_logfiles(self):
|
||||
log_files = list()
|
||||
base_dir = os.path.dirname(self.base_filename)
|
||||
for fn in os.listdir(base_dir):
|
||||
fp = os.path.join(base_dir, fn)
|
||||
if fp.startswith(self.base_filename) and os.path.isfile(fp):
|
||||
log_files.append(fp)
|
||||
return sorted(log_files)
|
||||
|
||||
def shouldRollover(self, record):
|
||||
size_exceeded = self.max_bytes > 0 and self.stream.tell() >= self.max_bytes
|
||||
time_exceeded = self.interval > 0 and self.last_rollover + self.interval <= time.monotonic()
|
||||
return size_exceeded or time_exceeded
|
||||
|
||||
def doRollover(self):
|
||||
if self.stream:
|
||||
self.stream.close()
|
||||
self.stream = self._open()
|
||||
|
||||
if self.backup_count > 0:
|
||||
while len(self.log_files) > self.backup_count:
|
||||
to_delete = self.log_files.pop()
|
||||
if os.path.exists(to_delete): # just being safe, should always exist
|
||||
os.remove(to_delete)
|
||||
|
||||
class UnixDomainSocketHandler(logging.Handler):
|
||||
def __init__(self, formatter):
|
||||
logging.Handler.__init__(self)
|
||||
self.setFormatter(formatter)
|
||||
self.pid = None
|
||||
|
||||
self.zctx = None
|
||||
self.sock = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def close(self):
|
||||
if self.sock is not None:
|
||||
self.sock.close()
|
||||
if self.zctx is not None:
|
||||
self.zctx.term()
|
||||
|
||||
def connect(self):
|
||||
self.zctx = zmq.Context()
|
||||
self.sock = self.zctx.socket(zmq.PUSH)
|
||||
self.sock.setsockopt(zmq.LINGER, 10)
|
||||
self.sock.connect(Paths.swaglog_ipc())
|
||||
self.pid = os.getpid()
|
||||
|
||||
def emit(self, record):
|
||||
if os.getpid() != self.pid:
|
||||
# TODO suppresses warning about forking proc with zmq socket, fix root cause
|
||||
warnings.filterwarnings("ignore", category=ResourceWarning, message="unclosed.*<zmq.*>")
|
||||
self.connect()
|
||||
|
||||
msg = self.format(record).rstrip('\n')
|
||||
# print("SEND".format(repr(msg)))
|
||||
try:
|
||||
s = chr(record.levelno)+msg
|
||||
self.sock.send(s.encode('utf8'), zmq.NOBLOCK)
|
||||
except zmq.error.Again:
|
||||
# drop :/
|
||||
pass
|
||||
|
||||
|
||||
class ForwardingHandler(logging.Handler):
|
||||
def __init__(self, target_logger):
|
||||
super().__init__()
|
||||
self.target_logger = target_logger
|
||||
|
||||
def emit(self, record):
|
||||
self.target_logger.handle(record)
|
||||
|
||||
|
||||
def add_file_handler(log):
|
||||
"""
|
||||
Function to add the file log handler to swaglog.
|
||||
This can be used to store logs when logmessaged is not running.
|
||||
"""
|
||||
handler = get_file_handler()
|
||||
handler.setFormatter(SwagLogFileFormatter(log))
|
||||
log.addHandler(handler)
|
||||
|
||||
|
||||
cloudlog = log = SwagLogger()
|
||||
log.setLevel(logging.DEBUG)
|
||||
|
||||
|
||||
outhandler = logging.StreamHandler()
|
||||
|
||||
print_level = os.environ.get('LOGPRINT', 'warning')
|
||||
if print_level == 'debug':
|
||||
outhandler.setLevel(logging.DEBUG)
|
||||
elif print_level == 'info':
|
||||
outhandler.setLevel(logging.INFO)
|
||||
elif print_level == 'warning':
|
||||
outhandler.setLevel(logging.WARNING)
|
||||
|
||||
ipchandler = UnixDomainSocketHandler(SwagFormatter(log))
|
||||
|
||||
log.addHandler(outhandler)
|
||||
# logs are sent through IPC before writing to disk to prevent disk I/O blocking
|
||||
log.addHandler(ipchandler)
|
||||
@@ -0,0 +1 @@
|
||||
test_common
|
||||
@@ -0,0 +1,19 @@
|
||||
import os
|
||||
from uuid import uuid4
|
||||
|
||||
from openpilot.common.utils import atomic_write_in_dir
|
||||
|
||||
|
||||
class TestFileHelpers:
|
||||
def run_atomic_write_func(self, atomic_write_func):
|
||||
path = f"/tmp/tmp{uuid4()}"
|
||||
with atomic_write_func(path) as f:
|
||||
f.write("test")
|
||||
assert not os.path.exists(path)
|
||||
|
||||
with open(path) as f:
|
||||
assert f.read() == "test"
|
||||
os.remove(path)
|
||||
|
||||
def test_atomic_write_in_dir(self):
|
||||
self.run_atomic_write_func(atomic_write_in_dir)
|
||||
@@ -0,0 +1,15 @@
|
||||
import os
|
||||
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
from openpilot.common.markdown import parse_markdown
|
||||
|
||||
|
||||
class TestMarkdown:
|
||||
def test_all_release_notes(self):
|
||||
with open(os.path.join(BASEDIR, "RELEASES.md")) as f:
|
||||
release_notes = f.read().split("\n\n")
|
||||
assert len(release_notes) > 10
|
||||
|
||||
for rn in release_notes:
|
||||
md = parse_markdown(rn)
|
||||
assert len(md) > 0
|
||||
@@ -0,0 +1,141 @@
|
||||
import pytest
|
||||
import datetime
|
||||
import os
|
||||
import threading
|
||||
import time
|
||||
import uuid
|
||||
|
||||
from openpilot.common.params import Params, ParamKeyFlag, UnknownKeyName
|
||||
|
||||
class TestParams:
|
||||
def setup_method(self):
|
||||
self.params = Params()
|
||||
|
||||
def test_params_put_and_get(self):
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("DongleId") == "cb38263377b873ee"
|
||||
|
||||
def test_params_non_ascii(self):
|
||||
st = b"\xe1\x90\xff"
|
||||
self.params.put("CarParams", st)
|
||||
assert self.params.get("CarParams") == st
|
||||
|
||||
def test_params_get_cleared_manager_start(self):
|
||||
self.params.put("CarParams", b"test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
|
||||
undefined_param = self.params.get_param_path(uuid.uuid4().hex)
|
||||
with open(undefined_param, "w") as f:
|
||||
f.write("test")
|
||||
assert os.path.isfile(undefined_param)
|
||||
|
||||
self.params.clear_all(ParamKeyFlag.CLEAR_ON_MANAGER_START)
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
assert not os.path.isfile(undefined_param)
|
||||
|
||||
def test_params_two_things(self):
|
||||
self.params.put("DongleId", "bob")
|
||||
self.params.put("AthenadPid", 123)
|
||||
assert self.params.get("DongleId") == "bob"
|
||||
assert self.params.get("AthenadPid") == 123
|
||||
|
||||
def test_params_get_block(self):
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put("CarParams", b"test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("CarParams", block=True) == b"test"
|
||||
|
||||
def test_params_unknown_key_fails(self):
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.get("swag")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.get_bool("swag")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.put("swag", "abc")
|
||||
|
||||
with pytest.raises(UnknownKeyName):
|
||||
self.params.put_bool("swag", True)
|
||||
|
||||
def test_remove_not_there(self):
|
||||
assert self.params.get("CarParams") is None
|
||||
self.params.remove("CarParams")
|
||||
assert self.params.get("CarParams") is None
|
||||
|
||||
def test_get_bool(self):
|
||||
self.params.remove("IsMetric")
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put_bool("IsMetric", True)
|
||||
assert self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put_bool("IsMetric", False)
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put("IsMetric", True)
|
||||
assert self.params.get_bool("IsMetric")
|
||||
|
||||
self.params.put("IsMetric", False)
|
||||
assert not self.params.get_bool("IsMetric")
|
||||
|
||||
def test_put_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_nonblocking("CarParams", b"test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"test"
|
||||
|
||||
def test_put_bool_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_bool_nonblocking("CarParams", True)
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"1"
|
||||
|
||||
def test_params_all_keys(self):
|
||||
keys = Params().all_keys()
|
||||
|
||||
# sanity checks
|
||||
assert len(keys) > 20
|
||||
assert len(keys) == len(set(keys))
|
||||
assert b"CarParams" in keys
|
||||
|
||||
def test_params_default_value(self):
|
||||
self.params.remove("LanguageSetting")
|
||||
self.params.remove("LongitudinalPersonality")
|
||||
self.params.remove("LiveParameters")
|
||||
|
||||
assert self.params.get("LanguageSetting") is None
|
||||
assert self.params.get("LanguageSetting", return_default=False) is None
|
||||
assert isinstance(self.params.get("LanguageSetting", return_default=True), str)
|
||||
assert isinstance(self.params.get("LongitudinalPersonality", return_default=True), int)
|
||||
assert self.params.get("LiveParameters") is None
|
||||
assert self.params.get("LiveParameters", return_default=True) is None
|
||||
|
||||
def test_params_get_type(self):
|
||||
# json
|
||||
self.params.put("ApiCache_FirehoseStats", {"a": 0})
|
||||
assert self.params.get("ApiCache_FirehoseStats") == {"a": 0}
|
||||
|
||||
# int
|
||||
self.params.put("BootCount", 1441)
|
||||
assert self.params.get("BootCount") == 1441
|
||||
|
||||
# bool
|
||||
self.params.put("AdbEnabled", True)
|
||||
assert self.params.get("AdbEnabled")
|
||||
assert isinstance(self.params.get("AdbEnabled"), bool)
|
||||
|
||||
# time
|
||||
now = datetime.datetime.now(datetime.UTC)
|
||||
self.params.put("InstallDate", now)
|
||||
assert self.params.get("InstallDate") == now
|
||||
@@ -0,0 +1,29 @@
|
||||
from openpilot.common.simple_kalman import KF1D
|
||||
|
||||
|
||||
class TestSimpleKalman:
|
||||
def setup_method(self):
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
self.kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
|
||||
def test_getter_setter(self):
|
||||
self.kf.set_x([[1.0], [1.0]])
|
||||
assert self.kf.x == [[1.0], [1.0]]
|
||||
|
||||
def test_update_returns_state(self):
|
||||
x = self.kf.update(100)
|
||||
assert x == [i[0] for i in self.kf.x]
|
||||
Executable
+63
@@ -0,0 +1,63 @@
|
||||
#!/usr/bin/env python3
|
||||
import os
|
||||
import time
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class TextWindow:
|
||||
def __init__(self, text):
|
||||
try:
|
||||
self.text_proc = subprocess.Popen(["./text.py", text],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "system", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.text_proc = None
|
||||
|
||||
def get_status(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.poll()
|
||||
return self.text_proc.returncode
|
||||
return None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def close(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.terminate()
|
||||
self.text_proc = None
|
||||
|
||||
def wait_for_exit(self):
|
||||
if self.text_proc is not None:
|
||||
while True:
|
||||
if self.get_status() == 1:
|
||||
return
|
||||
time.sleep(0.1)
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
text = """Traceback (most recent call last):
|
||||
File "./controlsd.py", line 608, in <module>
|
||||
main()
|
||||
File "./controlsd.py", line 604, in main
|
||||
controlsd_thread(sm, pm, logcan)
|
||||
File "./controlsd.py", line 455, in controlsd_thread
|
||||
1/0
|
||||
ZeroDivisionError: division by zero"""
|
||||
print(text)
|
||||
|
||||
with TextWindow(text) as s:
|
||||
for _ in range(100):
|
||||
if s.get_status() == 1:
|
||||
print("Got exit button")
|
||||
break
|
||||
time.sleep(0.1)
|
||||
print("gone")
|
||||
@@ -0,0 +1,15 @@
|
||||
import datetime
|
||||
from pathlib import Path
|
||||
|
||||
MIN_DATE = datetime.datetime(year=2025, month=2, day=21)
|
||||
|
||||
def min_date():
|
||||
# on systemd systems, the default time is the systemd build time
|
||||
systemd_path = Path("/lib/systemd/systemd")
|
||||
if systemd_path.exists():
|
||||
d = datetime.datetime.fromtimestamp(systemd_path.stat().st_mtime)
|
||||
return max(MIN_DATE, d + datetime.timedelta(days=1))
|
||||
return MIN_DATE
|
||||
|
||||
def system_time_valid():
|
||||
return datetime.datetime.now() > min_date()
|
||||
@@ -0,0 +1,27 @@
|
||||
import signal
|
||||
|
||||
class TimeoutException(Exception):
|
||||
pass
|
||||
|
||||
class Timeout:
|
||||
"""
|
||||
Timeout context manager.
|
||||
For example this code will raise a TimeoutException:
|
||||
with Timeout(seconds=5, error_msg="Sleep was too long"):
|
||||
time.sleep(10)
|
||||
"""
|
||||
def __init__(self, seconds, error_msg=None):
|
||||
if error_msg is None:
|
||||
error_msg = f'Timed out after {seconds} seconds'
|
||||
self.seconds = seconds
|
||||
self.error_msg = error_msg
|
||||
|
||||
def handle_timeout(self, signume, frame):
|
||||
raise TimeoutException(self.error_msg)
|
||||
|
||||
def __enter__(self):
|
||||
signal.signal(signal.SIGALRM, self.handle_timeout)
|
||||
signal.alarm(self.seconds)
|
||||
|
||||
def __exit__(self, exc_type, exc_val, exc_tb):
|
||||
signal.alarm(0)
|
||||
@@ -0,0 +1,51 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <ctime>
|
||||
|
||||
#ifdef __APPLE__
|
||||
#define CLOCK_BOOTTIME CLOCK_MONOTONIC
|
||||
#endif
|
||||
|
||||
static inline uint64_t nanos_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double millis_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000.0 + t.tv_nsec * 1e-6;
|
||||
}
|
||||
|
||||
static inline double seconds_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double seconds_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
// you probably should use nanos_since_boot instead
|
||||
static inline uint64_t nanos_monotonic() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_monotonic_raw() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC_RAW, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
@@ -0,0 +1,2 @@
|
||||
transformations
|
||||
transformations.cpp
|
||||
@@ -0,0 +1,70 @@
|
||||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for visualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 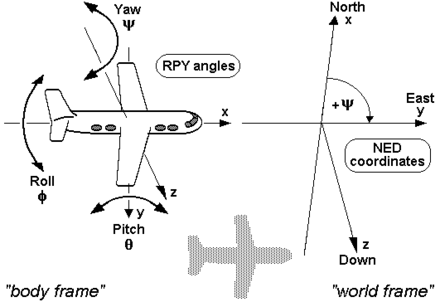|
|
||||
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in. <br> More details below. <br>|
|
||||
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road. <br> More details below. <br>|
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventions
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Car frame
|
||||
------
|
||||
Device frame is aligned with the road-facing camera used by openpilot. However, when controlling the vehicle it is helpful to think in a reference frame aligned with the vehicle. These two reference frames can be different.
|
||||
|
||||
The orientation of car frame is defined to be aligned with the car's direction of travel and the road plane when the vehicle is driving on a flat road and not turning. The origin of car frame is defined to be directly below device frame (in car frame), such that it is on the road plane. The position and orientation of this frame is not necessarily always aligned with the direction of travel or the road plane due to suspension movements and other effects.
|
||||
|
||||
|
||||
Calibrated frame
|
||||
------
|
||||
It is helpful for openpilot's driving model to take in images that look similar when mounted differently in different cars. To achieve this we "calibrate" the images by transforming it into calibrated frame. Calibrated frame is defined to be aligned with car frame in pitch and yaw, and aligned with device frame in roll. It also has the same origin as device frame.
|
||||
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
@@ -0,0 +1,5 @@
|
||||
Import('env', 'envCython')
|
||||
|
||||
transformations = env.Library('transformations', ['orientation.cc', 'coordinates.cc'])
|
||||
transformations_python = envCython.Program('transformations.so', 'transformations.pyx')
|
||||
Export('transformations', 'transformations_python')
|
||||
@@ -0,0 +1,179 @@
|
||||
import itertools
|
||||
import numpy as np
|
||||
from dataclasses import dataclass
|
||||
|
||||
import openpilot.common.transformations.orientation as orient
|
||||
|
||||
## -- hardcoded hardware params --
|
||||
@dataclass(frozen=True)
|
||||
class CameraConfig:
|
||||
width: int
|
||||
height: int
|
||||
focal_length: float
|
||||
|
||||
@property
|
||||
def size(self):
|
||||
return (self.width, self.height)
|
||||
|
||||
@property
|
||||
def intrinsics(self):
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
return np.array([
|
||||
[self.focal_length, 0.0, float(self.width)/2],
|
||||
[0.0, self.focal_length, float(self.height)/2],
|
||||
[0.0, 0.0, 1.0]
|
||||
])
|
||||
|
||||
@property
|
||||
def intrinsics_inv(self):
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
return np.linalg.inv(self.intrinsics)
|
||||
|
||||
@dataclass(frozen=True)
|
||||
class _NoneCameraConfig(CameraConfig):
|
||||
width: int = 0
|
||||
height: int = 0
|
||||
focal_length: float = 0
|
||||
|
||||
@dataclass(frozen=True)
|
||||
class DeviceCameraConfig:
|
||||
fcam: CameraConfig
|
||||
dcam: CameraConfig
|
||||
ecam: CameraConfig
|
||||
|
||||
def all_cams(self):
|
||||
for cam in ['fcam', 'dcam', 'ecam']:
|
||||
if not isinstance(getattr(self, cam), _NoneCameraConfig):
|
||||
yield cam, getattr(self, cam)
|
||||
|
||||
_ar_ox_fisheye = CameraConfig(1928, 1208, 567.0) # focal length probably wrong? magnification is not consistent across frame
|
||||
_os_fisheye = CameraConfig(2688 // 2, 1520 // 2, 567.0 / 4 * 3)
|
||||
_ar_ox_config = DeviceCameraConfig(CameraConfig(1928, 1208, 2648.0), _ar_ox_fisheye, _ar_ox_fisheye)
|
||||
_os_config = DeviceCameraConfig(CameraConfig(2688 // 2, 1520 // 2, 1522.0 * 3 / 4), _os_fisheye, _os_fisheye)
|
||||
_neo_config = DeviceCameraConfig(CameraConfig(1164, 874, 910.0), CameraConfig(816, 612, 650.0), _NoneCameraConfig())
|
||||
|
||||
DEVICE_CAMERAS = {
|
||||
# A "device camera" is defined by a device type and sensor
|
||||
|
||||
# sensor type was never set on eon/neo/two
|
||||
("neo", "unknown"): _neo_config,
|
||||
# unknown here is AR0231, field was added with OX03C10 support
|
||||
("tici", "unknown"): _ar_ox_config,
|
||||
|
||||
# before deviceState.deviceType was set, assume tici AR config
|
||||
("unknown", "ar0231"): _ar_ox_config,
|
||||
("unknown", "ox03c10"): _ar_ox_config,
|
||||
|
||||
# simulator (emulates a tici)
|
||||
("pc", "unknown"): _ar_ox_config,
|
||||
}
|
||||
prods = itertools.product(('tici', 'tizi', 'mici'), (('ar0231', _ar_ox_config), ('ox03c10', _ar_ox_config), ('os04c10', _os_config)))
|
||||
DEVICE_CAMERAS.update({(d, c[0]): c[1] for d, c in prods})
|
||||
|
||||
# device/mesh : x->forward, y-> right, z->down
|
||||
# view : x->right, y->down, z->forward
|
||||
device_frame_from_view_frame = np.array([
|
||||
[ 0., 0., 1.],
|
||||
[ 1., 0., 0.],
|
||||
[ 0., 1., 0.]
|
||||
])
|
||||
view_frame_from_device_frame = device_frame_from_view_frame.T
|
||||
|
||||
|
||||
# aka 'extrinsic_matrix'
|
||||
# road : x->forward, y -> left, z->up
|
||||
def get_view_frame_from_road_frame(roll, pitch, yaw, height):
|
||||
device_from_road = orient.rot_from_euler([roll, pitch, yaw]).dot(np.diag([1, -1, -1]))
|
||||
view_from_road = view_frame_from_device_frame.dot(device_from_road)
|
||||
return np.hstack((view_from_road, [[0], [height], [0]]))
|
||||
|
||||
|
||||
|
||||
# aka 'extrinsic_matrix'
|
||||
def get_view_frame_from_calib_frame(roll, pitch, yaw, height):
|
||||
device_from_calib= orient.rot_from_euler([roll, pitch, yaw])
|
||||
view_from_calib = view_frame_from_device_frame.dot(device_from_calib)
|
||||
return np.hstack((view_from_calib, [[0], [height], [0]]))
|
||||
|
||||
|
||||
def vp_from_ke(m):
|
||||
"""
|
||||
Computes the vanishing point from the product of the intrinsic and extrinsic
|
||||
matrices C = KE.
|
||||
|
||||
The vanishing point is defined as lim x->infinity C (x, 0, 0, 1).T
|
||||
"""
|
||||
return (m[0, 0]/m[2, 0], m[1, 0]/m[2, 0])
|
||||
|
||||
|
||||
def roll_from_ke(m):
|
||||
# note: different from calibration.h/RollAnglefromKE: i think that one's just wrong
|
||||
return np.arctan2(-(m[1, 0] - m[1, 1] * m[2, 0] / m[2, 1]),
|
||||
-(m[0, 0] - m[0, 1] * m[2, 0] / m[2, 1]))
|
||||
|
||||
|
||||
def normalize(img_pts, intrinsics):
|
||||
# normalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
intrinsics_inv = np.linalg.inv(intrinsics)
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0], 1))))
|
||||
img_pts_normalized = img_pts.dot(intrinsics_inv.T)
|
||||
img_pts_normalized[(img_pts < 0).any(axis=1)] = np.nan
|
||||
return img_pts_normalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def denormalize(img_pts, intrinsics, width=np.inf, height=np.inf):
|
||||
# denormalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0], 1), dtype=img_pts.dtype)))
|
||||
img_pts_denormalized = img_pts.dot(intrinsics.T)
|
||||
if np.isfinite(width):
|
||||
img_pts_denormalized[img_pts_denormalized[:, 0] > width] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:, 0] < 0] = np.nan
|
||||
if np.isfinite(height):
|
||||
img_pts_denormalized[img_pts_denormalized[:, 1] > height] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:, 1] < 0] = np.nan
|
||||
return img_pts_denormalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def get_calib_from_vp(vp, intrinsics):
|
||||
vp_norm = normalize(vp, intrinsics)
|
||||
yaw_calib = np.arctan(vp_norm[0])
|
||||
pitch_calib = -np.arctan(vp_norm[1]*np.cos(yaw_calib))
|
||||
roll_calib = 0
|
||||
return roll_calib, pitch_calib, yaw_calib
|
||||
|
||||
|
||||
def device_from_ecef(pos_ecef, orientation_ecef, pt_ecef):
|
||||
# device from ecef frame
|
||||
# device frame is x -> forward, y-> right, z -> down
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_ecef.shape
|
||||
pt_ecef = np.atleast_2d(pt_ecef)
|
||||
ecef_from_device_rot = orient.rotations_from_quats(orientation_ecef)
|
||||
device_from_ecef_rot = ecef_from_device_rot.T
|
||||
pt_ecef_rel = pt_ecef - pos_ecef
|
||||
pt_device = np.einsum('jk,ik->ij', device_from_ecef_rot, pt_ecef_rel)
|
||||
return pt_device.reshape(input_shape)
|
||||
|
||||
|
||||
def img_from_device(pt_device):
|
||||
# img coordinates from pts in device frame
|
||||
# first transforms to view frame, then to img coords
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_device.shape
|
||||
pt_device = np.atleast_2d(pt_device)
|
||||
pt_view = np.einsum('jk,ik->ij', view_frame_from_device_frame, pt_device)
|
||||
|
||||
# This function should never return negative depths
|
||||
pt_view[pt_view[:, 2] < 0] = np.nan
|
||||
|
||||
pt_img = pt_view/pt_view[:, 2:3]
|
||||
return pt_img.reshape(input_shape)[:, :2]
|
||||
|
||||
@@ -0,0 +1,43 @@
|
||||
#pragma once
|
||||
|
||||
#include <eigen3/Eigen/Dense>
|
||||
|
||||
#define DEG2RAD(x) ((x) * M_PI / 180.0)
|
||||
#define RAD2DEG(x) ((x) * 180.0 / M_PI)
|
||||
|
||||
struct ECEF {
|
||||
double x, y, z;
|
||||
Eigen::Vector3d to_vector() const {
|
||||
return Eigen::Vector3d(x, y, z);
|
||||
}
|
||||
};
|
||||
|
||||
struct NED {
|
||||
double n, e, d;
|
||||
Eigen::Vector3d to_vector() const {
|
||||
return Eigen::Vector3d(n, e, d);
|
||||
}
|
||||
};
|
||||
|
||||
struct Geodetic {
|
||||
double lat, lon, alt;
|
||||
bool radians=false;
|
||||
};
|
||||
|
||||
ECEF geodetic2ecef(const Geodetic &g);
|
||||
Geodetic ecef2geodetic(const ECEF &e);
|
||||
|
||||
class LocalCoord {
|
||||
public:
|
||||
Eigen::Matrix3d ned2ecef_matrix;
|
||||
Eigen::Matrix3d ecef2ned_matrix;
|
||||
Eigen::Vector3d init_ecef;
|
||||
LocalCoord(const Geodetic &g, const ECEF &e);
|
||||
LocalCoord(const Geodetic &g) : LocalCoord(g, ::geodetic2ecef(g)) {}
|
||||
LocalCoord(const ECEF &e) : LocalCoord(::ecef2geodetic(e), e) {}
|
||||
|
||||
NED ecef2ned(const ECEF &e);
|
||||
ECEF ned2ecef(const NED &n);
|
||||
NED geodetic2ned(const Geodetic &g);
|
||||
Geodetic ned2geodetic(const NED &n);
|
||||
};
|
||||
@@ -0,0 +1,18 @@
|
||||
from openpilot.common.transformations.orientation import numpy_wrap
|
||||
from openpilot.common.transformations.transformations import (ecef2geodetic_single,
|
||||
geodetic2ecef_single)
|
||||
from openpilot.common.transformations.transformations import LocalCoord as LocalCoord_single
|
||||
|
||||
|
||||
class LocalCoord(LocalCoord_single):
|
||||
ecef2ned = numpy_wrap(LocalCoord_single.ecef2ned_single, (3,), (3,))
|
||||
ned2ecef = numpy_wrap(LocalCoord_single.ned2ecef_single, (3,), (3,))
|
||||
geodetic2ned = numpy_wrap(LocalCoord_single.geodetic2ned_single, (3,), (3,))
|
||||
ned2geodetic = numpy_wrap(LocalCoord_single.ned2geodetic_single, (3,), (3,))
|
||||
|
||||
|
||||
geodetic2ecef = numpy_wrap(geodetic2ecef_single, (3,), (3,))
|
||||
ecef2geodetic = numpy_wrap(ecef2geodetic_single, (3,), (3,))
|
||||
|
||||
geodetic_from_ecef = ecef2geodetic
|
||||
ecef_from_geodetic = geodetic2ecef
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user